 图 1 基于特征优化稀疏表示分类器的结构
Fig.1 Structure of sparse representation classifier based on optimized features
图 1 基于特征优化稀疏表示分类器的结构
Fig.1 Structure of sparse representation classifier based on optimized features
YU Aihua,WANG Hongan.3D palm-print sparse representation classification based on optimized features[J].Journal of Zhejiang University of Science and Technology,2017,30(06):450-456.[doi: 10.3969/j.issn.1671-8798.2017.06.010 ]

针对大数据背景下3D掌纹技术存在的问题,提出一种基于优化投影矩阵的3D掌纹稀疏表示识别技术架构。系统首先提取3D掌纹表面类型特征,然后利用分块方向梯度直方图构成训练样本,通过优化设计投影矩阵,使得同类掌纹投影特征互相关性变大,异类掌纹投影特征互相关性变小; 最后利用投影后3D掌纹特征稀疏表示分类,并比较L0/L1/L2范数各种快速算法性能。通过投影优化后的系统,在识别率和实时性上都有所改善,仿真实验证实了研究工作的有效性。
In response to the 3D palm-print technical problems in the context of big data, this paper proposes a new 3D palm-print sparse representation classification technique based on optimized features. Firstly, the 3D palm-print surface pattern features are extracted from the training images. Secondly, the blocked histogram oriented gradient features are vectorized as the training samples. A projection matrix is optimized from the training features, which enhance the homogeneous coherence and reduces the heterogeneous one. Finally, the optimized features are used in the sparse representation classification system via L0/L1/L2 norm representation algorithm through comparison. With these modifications, the new 3D palm-print recognition system can improve real-time performance and recognition rate greatly. Experiments results validate the proposed methods.
掌纹识别技术是近几年提出的一种新兴的生物识别技术,以其丰富的信息量,稳定而唯一的特征越来越受到学术界的关注[1-3]。与常见的生物识别技术(指纹、虹膜、人脸)相比,掌纹识别技术具有识别率高、普适性强、速度快、设备低廉、用户接受性好等优点,因此在各种身份识别应用中,如公共安全、出入控制、网络支付等领域有着广泛的应用。2D掌纹图像识别是当前掌纹识别技术研究的主流,虽然2D掌纹识别通常能获得较高的准确率,但其存在一些内在的缺陷:掌纹本身除了丰富的纹理特征以外,还包含丰富的深度和曲面信息,这在2D图像中无法得以体现; 光照的影响会导致2D掌纹识别率显著下降; 2D掌纹图像容易被伪造和复制,这就会导致其抗攻击能力较弱。与2D掌纹相比较,3D掌纹能有效地克服上述困难,对光照和噪声有更好的鲁棒性[4]。同时,3D掌纹在仿制难度上也远大于2D掌纹。掌纹识别主要包括两个关键过程:特征提取和分类器构建。随着信息技术应用的不断深入,大数据背景下3D掌纹识别技术遇到的最大问题就是数据量太大,即“维数灾难”问题。研究表明,当维数越来越高时,分析和处理数据的复杂度及成本会快速增长。在分析高维数据时,所需的空间也非常大,以致经常制约算法的实现。于是高维海量数据的特征提取就成为迫切需要解决的问题和巨大的挑战,而特征提取算法优劣是直接关系到识别性能的关键因素。目前广泛应用的特征降维方法有主成分分析(principle components analysis,PCA)[5]、线性判别式分析(linear discriminant analysis,LDA)[6-7]等,其优点是实现简单,降低数据冗余方便,运算速度较快,同时具有一定的抗噪性; 但缺点是容易破坏原始数据的相关性且难以统计图像纹理特性等。
针对大数据背景下3D掌纹技术存在的问题,笔者借鉴压缩感知理论(compressive sensing, CS)成果[8-9],将稀疏表示的分类器(sparse representation based classifier,SRC)引入模式识别[11-12],提出一种基于优化特征投影的3D掌纹稀疏表示识别技术架构。系统首先利用掌纹曲面的3D曲率信息提取掌纹表面类型特征,然后通过分块方向梯度直方图提取图像特征构成训练字典,通过优化设计投影矩阵,即寻求一种压缩变换,使得在某种意义下各类间相关性变小,同类间相关性变大。最后利用优化的投影矩阵进行3D掌纹分类,利用L0/L1/L2范数算法进行稀疏表示分类比较,通过比较各个类别的稀疏表示残差能量实现掌纹图像分类识别。仿真实验表明,该方法相比于传统方法L2范数算法,其抗干扰能力有所加强,从而有效地降低了特征维数,且运算速度快识别性能良好。
1 CS数学模型对于一个x∈RN×1输入信号,其线性投影y过程为:
y=Φx∈RM×1。(1)
式(1)中:Φ∈RM×N称为投影矩阵。CS基本内容就是当MN时,对于测量值y和测量矩阵Φ,如何恢复原始信号x。显然,式(1)是一个欠定问题,在求解过程中要对x加以约束。
设信号x可由L个基向量{ψl}线性表示为:
x=∑Ll=1slψl=△Ψs。(2)
式(2)中:Ψ∈RN×L为字典(矩阵); s为稀疏向量(大部分元素为0),若s中有K个非零元素,则x称为在Ψ下K稀疏,在K<M这个条件下式(1)有解。
将式(2)代入式(1)得:
y=Φx=ΦΨs=△Ds, ‖s‖0≤K。(3)
式(3)中:D∈RM×L称为等效字典。
2 基于优化特征投影矩阵的3D掌纹识别系统2.1 特征优化稀疏表示分类器的结构特征优化稀疏表示分类器的结构如图1所示。首先离线训练样本获得投影矩阵和等效字典,然后测试样本经过特征提取后再进行投影压缩,最后在等效字典下稀疏表示,根据稀疏表示的残差确定识别结果。
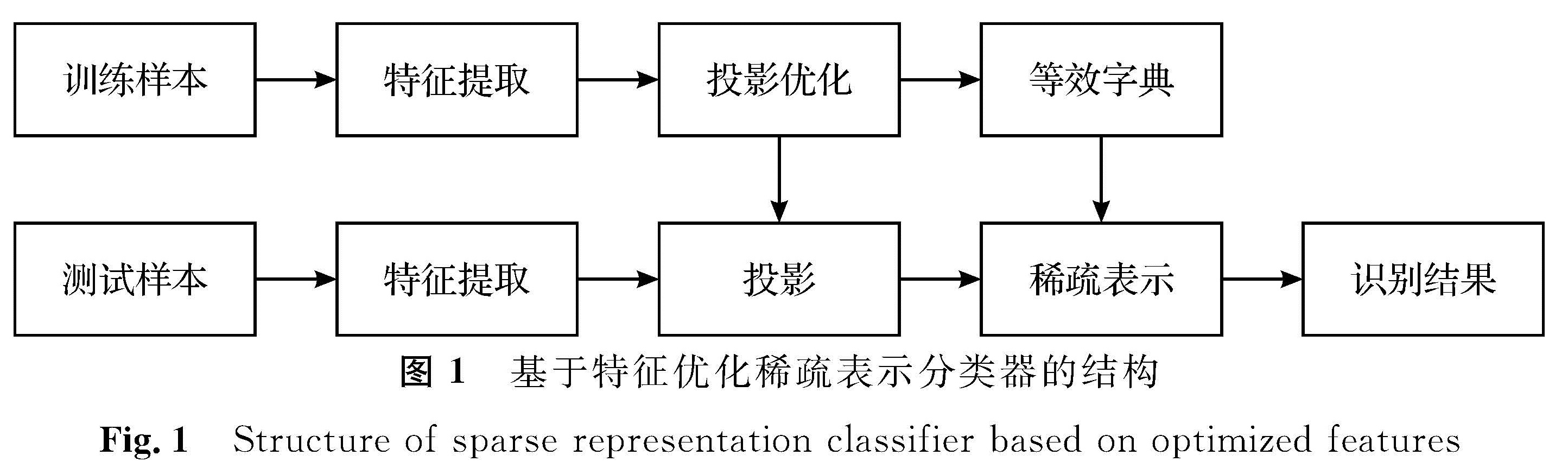
图1 基于特征优化稀疏表示分类器的结构
Fig.1 Structure of sparse representation classifier based on optimized features
2.2 采用表面类型掌纹图像特征提取
表面类型特征[13]是基于表面平均曲率KM和高斯曲率KG进行定义的一种表面特征(surface type, ST),其定义如表1,它具有很高的鉴别特性。均值曲率和高斯曲率是曲面的几何特征,曲面局部的固有形状决定各点曲率值,具有位置不变性。因此,用表面类型特征来刻画3D掌纹的曲面每个点的表面类型特征,具有一定的鲁棒性和较高的识别精度。3D掌纹的曲面可以表示为γ(u,v)=S(u,v,f(u,v)),这里采用Besland等[14]提出的一种计算高斯曲率和均值曲率特征的方法。

表1 基于表面类型特征(ST)的定义
Table 1 The definition of surface type feature
高斯曲率定义为:
KG=(fuufvv-f2uv)2/(1+f2u+f2v)2。(4)
均值曲率定义为:
KM=((1+f2u)fvv+(1+f2v)fuu-2fufvfuv)2/(1+f2u+f2v)3/2。(5)
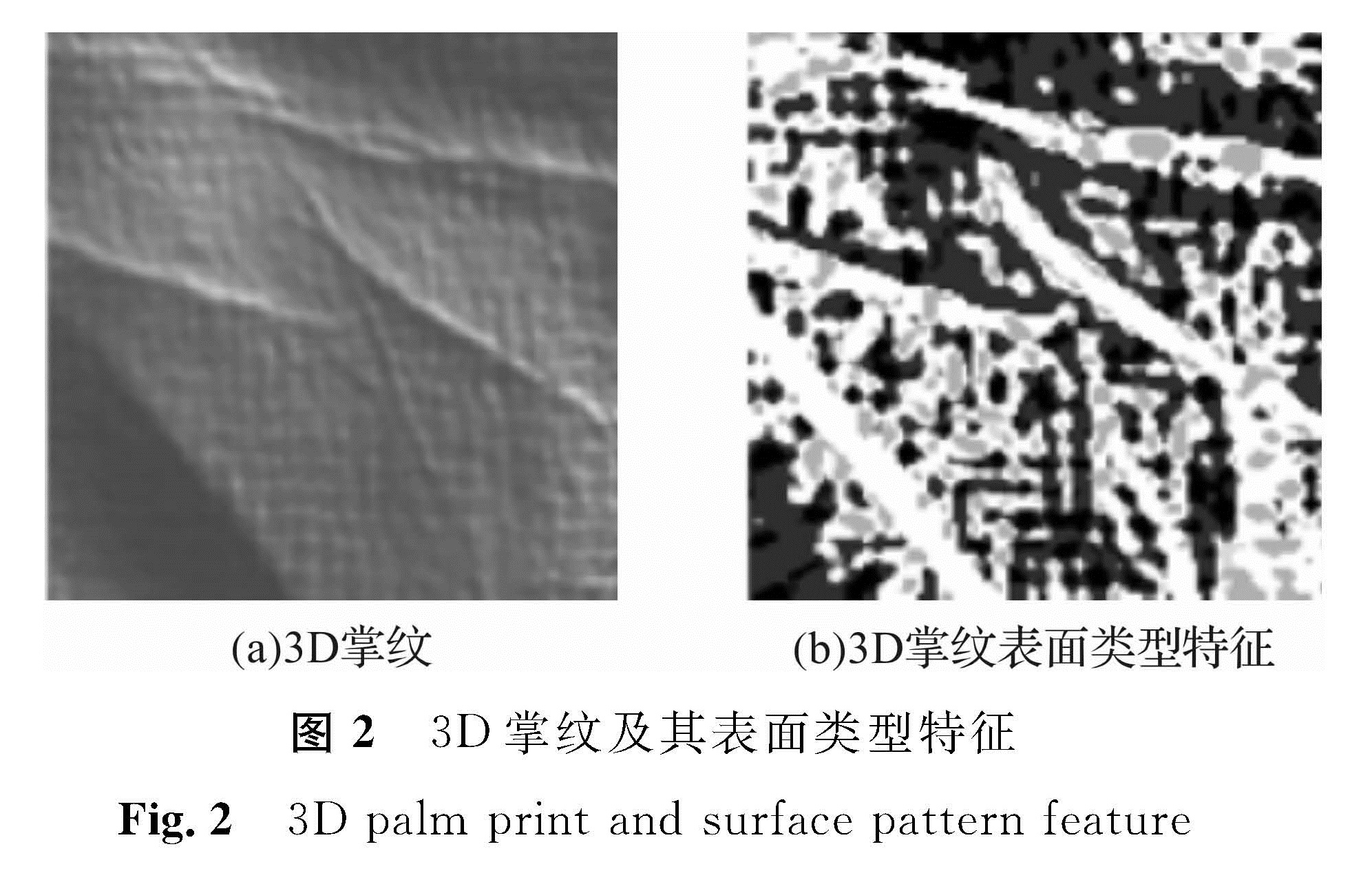
图2 3D掌纹及其表面类型特征
Fig.2 3D palm print and surface pattern feature
式(4)~(5)中:fu、fv、fuu、fvv、fuv分别是f的一阶、二阶和混合偏导。高斯曲率和均值曲率仅依赖于曲面片本身,与空间中所处的位置无关。
因此,均值曲率和高斯曲率对3D掌纹的旋转、平移、形变都具有一定的鲁棒性。图2(a)和(b)分别显示3D掌纹图像及其表面类型特征。
2.3 采用分块方向梯度直方图特征提取方向梯度直方图(histogram of oriented gradient, HOG)特征[15]是一种在机器视觉和图像处理中用来进行纹理特征描述的算子。它通过统计和计算图像梯度方向分布直方图来表征特征。为了缓解特征对齐问题对稀疏表示的影响,将特征进行分块处理,统计每个块的梯度直方图(不同梯度的个数),即可形成每个块的描述算子,各个块的梯度直方图串联起来便得到目标的HOG特征描述算子。3D掌纹特征分块图和其中一块的HOG特征如图3(a)和(b)所示。这里的3D掌纹中心区域通过对感兴趣区域裁剪获取,该区域中信息用作特征提取和识别,该区域的选取具有较好的稳定性,但不具有唯一性。
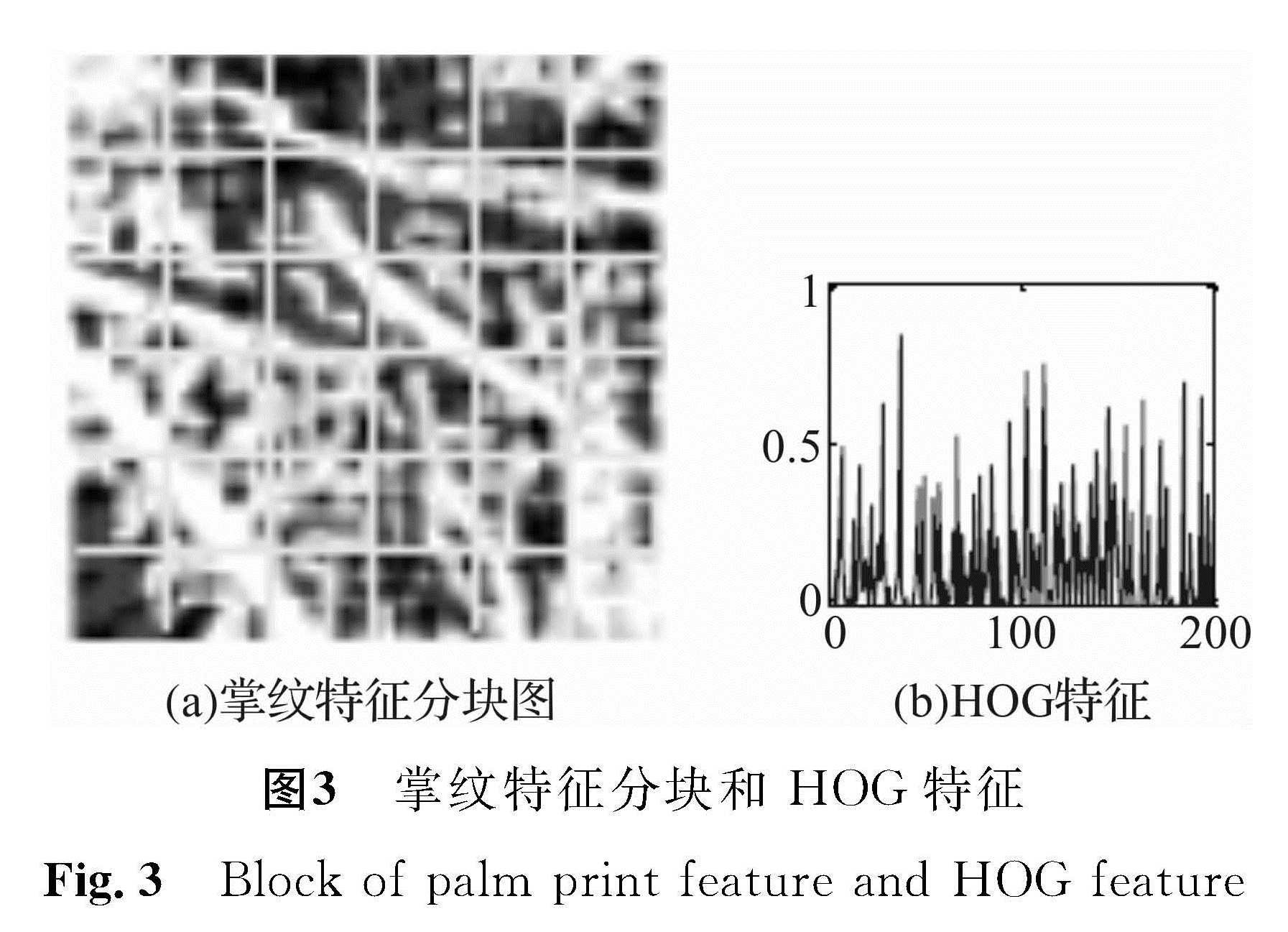
图3 掌纹特征分块和HOG特征
Fig.3 Block of palm print feature and HOG feature
2.4 基于特征投影优化的3D掌纹识别稀疏分类器的模型
若3D掌纹库中有I类不同手掌的掌纹样本,其中每类手掌的掌纹又有Q个不同的掌纹样本,则每个样本图像按照上面方法提取表面特征形成一个列向量,设其维度为N×1,并归一化处理后作为字典库中的一个原子,这样形成字典库Ψ=[Ψ1,Ψ2,…,Ψi,…,ΨI]={ψl}∈RN×L。对任意的1≤i≤I,字典子块Ψi∈RN×Q,是第i类手掌的掌纹样本集合,易见L=IQ。对1≤l≤L,ψl∈RN×1且‖ψl‖2=1是字典的一个列向量,即原子。
对于任意输入的测试掌纹样本,按照同样方法提取特征排列形成一个N×1的列向量x,并假设x可以在特征字典库Ψ下表示为:
x=Ψs+ε。(6)
式(6)中:ε∈RN×1为误差。将测试样本特征x进行压缩投影,得到投影信号y∈RM×1,过程为:
y=Φx=ΦΨs+Φε=△Ds+e。(7)
式(7)中:Φ∈RM×N为投影矩阵; D=ΦΨ∈RM×L为等效字典; e=Φε∈RM×1为投影误差。3D掌纹识别系统的稀疏表示模型为:
(^overs)=arg mins‖y-Ds‖22+λ‖s‖0。
这个问题是非凸优化问题,难以求解。由于信号是K稀疏,在满足有限等距性质(restricted isometry property, RIP)条件下与如下问题等价。
(^overs)=arg mins‖y-Ds‖22+λ‖s‖1。
这是一个凸优化问题,可以有很多算法来解决[16],如同伦算法[17](homotopy, HT)、对偶增量拉格朗日乘子[18](dual augmented lagrangian multiplier, DALM)、快速迭代收缩阈值[19](fast iterative shrinkage thresholding, FIST),为了简化算法,提高系统实时性能,文献[20]采用L2范数来稀疏表示。
(^overs)=arg mins‖y-Ds‖22+λ‖s‖22。(8)
在求得{(^overs)}后,将该结果应用于掌纹识别系统。定义s=[sT1,…,sTi,…,sTI]T,任意i,si∈RQ×1,Di=ΦΨi∈RM×Q形成问题
(^overi)=arg mini‖y-Di(^overs)i‖22,i∈[1,I]。(9)
此时求得的(^overi)就是系统对输入x所判别的结果。
基于特征优化与稀疏表示的3D掌纹分类算法流程如下:
1)对3D掌纹训练样本提取表面类型特征,将表面类型特征利用分块技术提取HOG特征,形成训练样本。
2)对3D掌纹特征训练样本归一化处理,按一定要求排列,构造字典库Ψ=[Ψ1,…,Ψi,…,ΨI]。
3)将测试图像x0按1)~2)预处理形成列向量x。
4)根据Ψ设计投影矩阵Φ。
5)将测试样本按同样步骤得到特征x在Φ下的投影值y,通过式(6)~(8)对应的算法解{(^overs)i},进而通过式(9)对掌纹进行分类判别。
3 特征投影矩阵优化设计字典子块Ψi∈RN×Q,字典库Ψ=[Ψ1,…,Ψi,…,ΨI]∈RN×L,等效字典为:
D=ΦΨ=[D1,…,Di,…,DI]∈RM×L。(10)
式(10)中:投影矩阵Φ∈RM×N; Di=ΦΨi∈RM×Q。
目前测量矩阵优化的研究已经取得大量理论成果[21-23],这些成果可归结为:
minΦ‖G-Gt‖2F, G=DTD。(11)
式(11)中:‖·‖F为弗罗贝尼乌斯范数; G为D格拉姆(Gram)矩阵,对于字典Ψ,G仅仅与Φ有关; Gt为目标格拉姆矩阵。式(11)通过优化Φ使得D对应的格拉姆矩阵G逼近Gt。
Cleju等的研究显示[22],对于不能稀疏表示的x,如图像等,可以通过设计Φ使得D具有字典Ψ类似的性质,这样的CS系统恢复性能较好,则目标格拉姆矩阵是Gt=ΨTΨ=△GΨ。对于研究的3D掌纹图像样本,其在字典Ψ下的数学模型如式(4),通常ε不会是误差向量,因此,以Gt为目标优化投影矩阵Φ。
字典库Ψ由I类掌纹样本集合组成。这里,一类指同一手掌的掌纹由于其光照、角度、位置等的变化而组成的集合,一般同一类子块Ψi中的原子两两内积较大,而不同的字典子块之间一般较小。令
ΨTΨ=[ΨT1Ψ1 ΨT1Ψ2 … ΨT1ΨI
ΨT2Ψ1 ΨT2Ψ2 … ΨT2ΨI
ΨTIΨ1 ΨTIΨ2 … ΨTIΨI]=△[Ψ11 Ψ12 … Ψ1I
Ψ21 Ψ22 … Ψ2I
ΨI1 ΨI2 … ΨII]。
对目标格拉姆矩阵做改进,即
Gt=ΨTΨ·Δ。(12)
式(12)中:·表示点乘,修正矩阵Δ∈RL×L可表达为:
Δ=[Δ11 Δ12 … Δ1I
Δ21 Δ22 … Δ2I
ΔI1 ΔI2 … ΔII]={δmn}。
对任意1≤i≤I、1≤j≤I,Δij的尺寸均与Ψij相同; 1≤m≤L、1≤n≤L,{δmn}为Δ中对应位置的元素,且
δmn={1-η, i≠j,
1+η, i=j。(13)
式(13)中:η>0为调整因子。式(12)构造的Gt通过有鉴别地改变其相关性,为后面提高稀疏表示识别性能打下基础。由此,形成投影矩阵设计问题
(^overΦ)=argminΦ‖G-Gt‖2F, G=ΨTΦTΦΨ。(14)
Gt由式(12)定义,其求解过程
参考文献[23]。定义(~overN)=rank(Φ),式(14)解的形式为:
(^overΦ)=U[Σ11 0][V11 0
0 V22]TUTΨ。(15)
式(14)中:U为M×M的正交矩阵; V22为任意尺寸为(N-(~overN))×(N-(~overN))的正交矩阵。
由此可见,整个算法只与修正常数η有关,对于给定的Ψ及η,系统只要离线求得Φ一次,而且式(16)是解析解结果,计算代价不大。
4 仿真实验结果分析采用香港理工大学3D掌纹数据库,该数据库是一个规模比较大的3D掌纹数据库,包括200人(其中男性136人,女性64人)的8 000个掌纹,年龄跨度10~55岁。每个人的3D掌纹数据分2次采集,采集间隔为1个月。在每次采样过程中,记录每个手掌的10个3D掌纹数据,因此共有400个类别,每个类别有20个3D掌纹。第一次采集的10个3D掌纹数据用于训练,第二次采集的数据用于测试。原始3D掌纹的分辨率为768×576像素,z方向上的精度为32位。原始3D掌纹数据存在大量噪声,因此不适合用来做特征提取。在进行特征提取前,必须先从原始3D掌纹数据中提取出比较稳定的中心块(region of interest,ROI),这样既可以减少噪声数据干扰,又可以使得提取到的中心块位置相对统一。3D掌纹的中心区域(大小为128×128像素)通过对感兴趣区域裁剪获得,被用来进行特征提取和识别,分成6×6块,每块5×5个特征,共900个特征。在此特征上开展压缩方法比较及分类器2种类型的实验比较。实验中,平台操作系统为Windows XP; CPU为3.4 GHz; 内存为4 GB。
4.1 参数η设置针对测量矩阵优化设计中的参数η,测试其对系统性能的影响。设定测量信号维度M=200,压缩率为900/200,对η取不同的值,通过优化设计Φ,选用计算速度较快的L2范数算法进行测试。图4显示的是3D掌纹库识别率随η变化的曲线。从图4可知,适当提高η,3D掌纹库识别率基本上呈上升趋势。可见,适当选取的η确实提高了系统识别率。综合考虑,在后续仿真中固定修正常数η=0.2,对这一3D掌纹库而言均可取得较好的识别效果。
4.2 压缩方法与M对识别性能的影响将测试信号按照主成分分析(PCA)、随机采样(RDM)、投影矩阵优化(PMO)3种压缩方式稀疏表示分类识别。由CS理论分析可知,当压缩投影值M较大时,系统识别精度也相对更高,对3D掌纹库的识别率统计如图5所示,但是相应的计算时间也增加。从图5可知,系统识别率基本上随着压缩投影值M增加。当M=200时,系统识别率稳定在一个比较理想的位置,即压缩率为900/200。图5数据表明,投影矩阵优化方法相对于随机采样及主成分分析在系统识别率上均达到最大值。
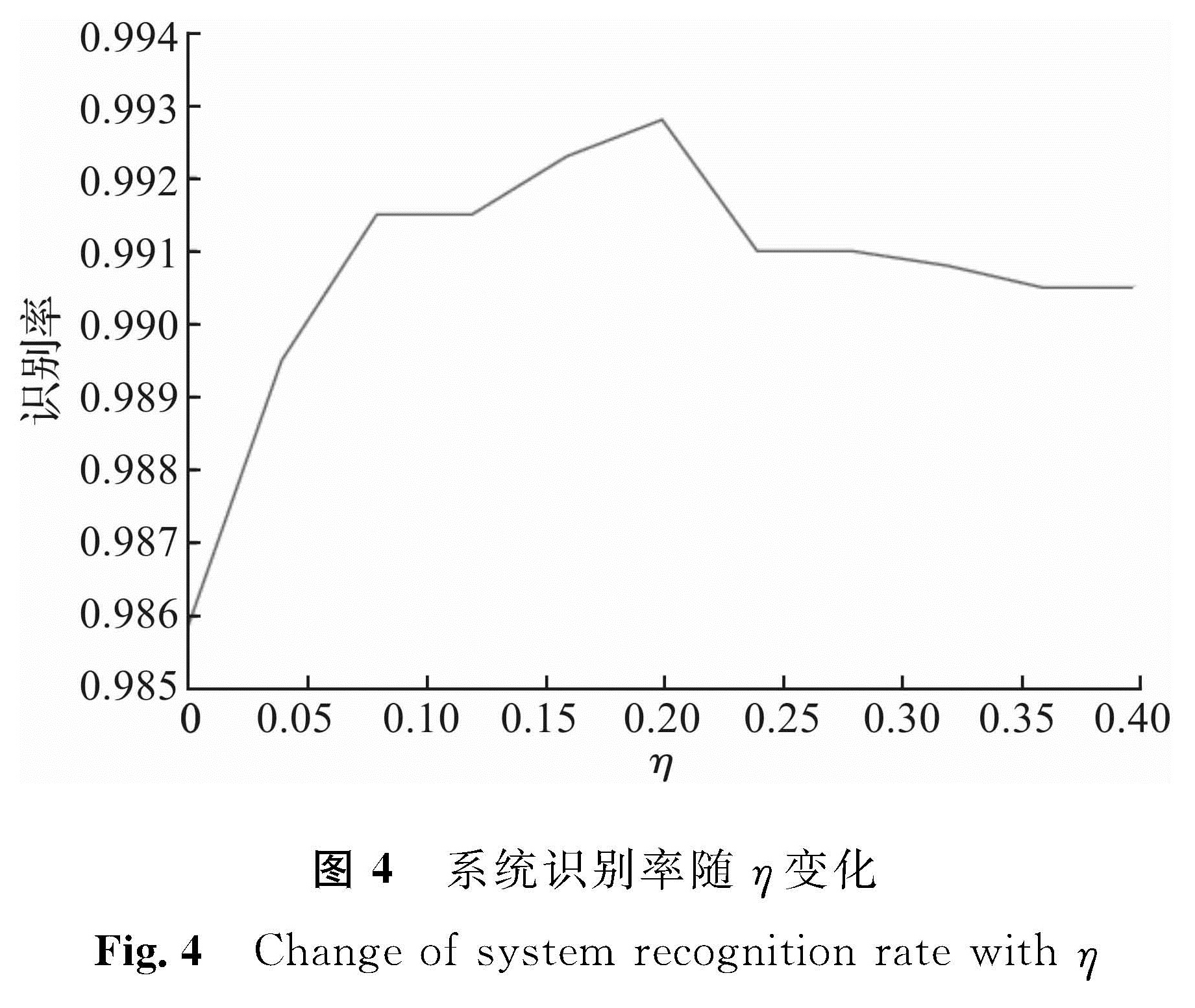
图4 系统识别率随η变化
Fig.4 Change of system recognition rate with η
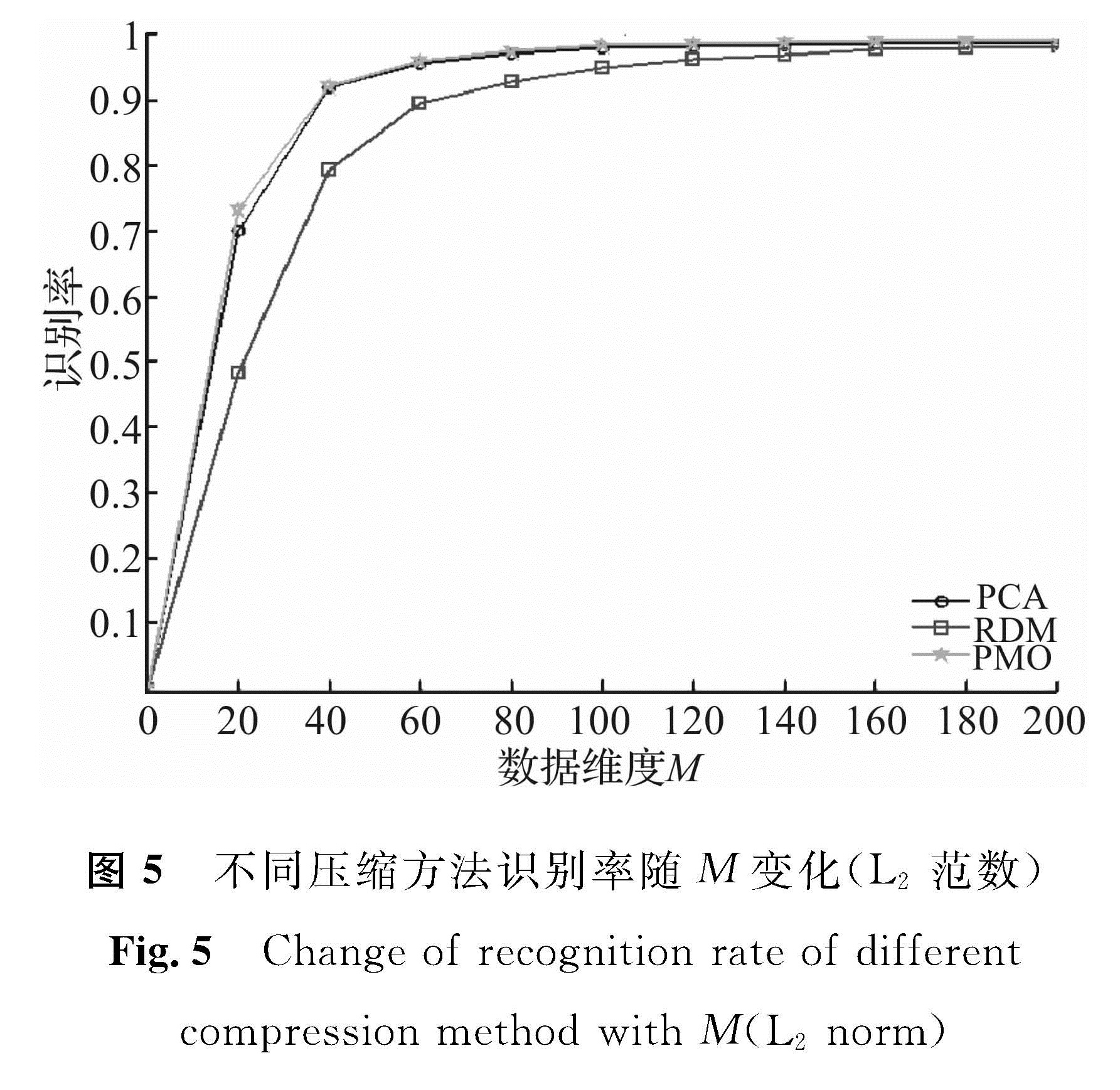
图5 不同压缩方法识别率随M变化(L2范数)
Fig.5 Change of recognition rate of differentcompression method with M(L2 norm)
4.3 分类器性能测试
将3D掌纹信号进行投影压缩,再对投影值进行识别分类,分类方法分别采用L0/L1/L2范数求解,不同分类器识别率如表2所示,不同分类器识别时间如表3所示。
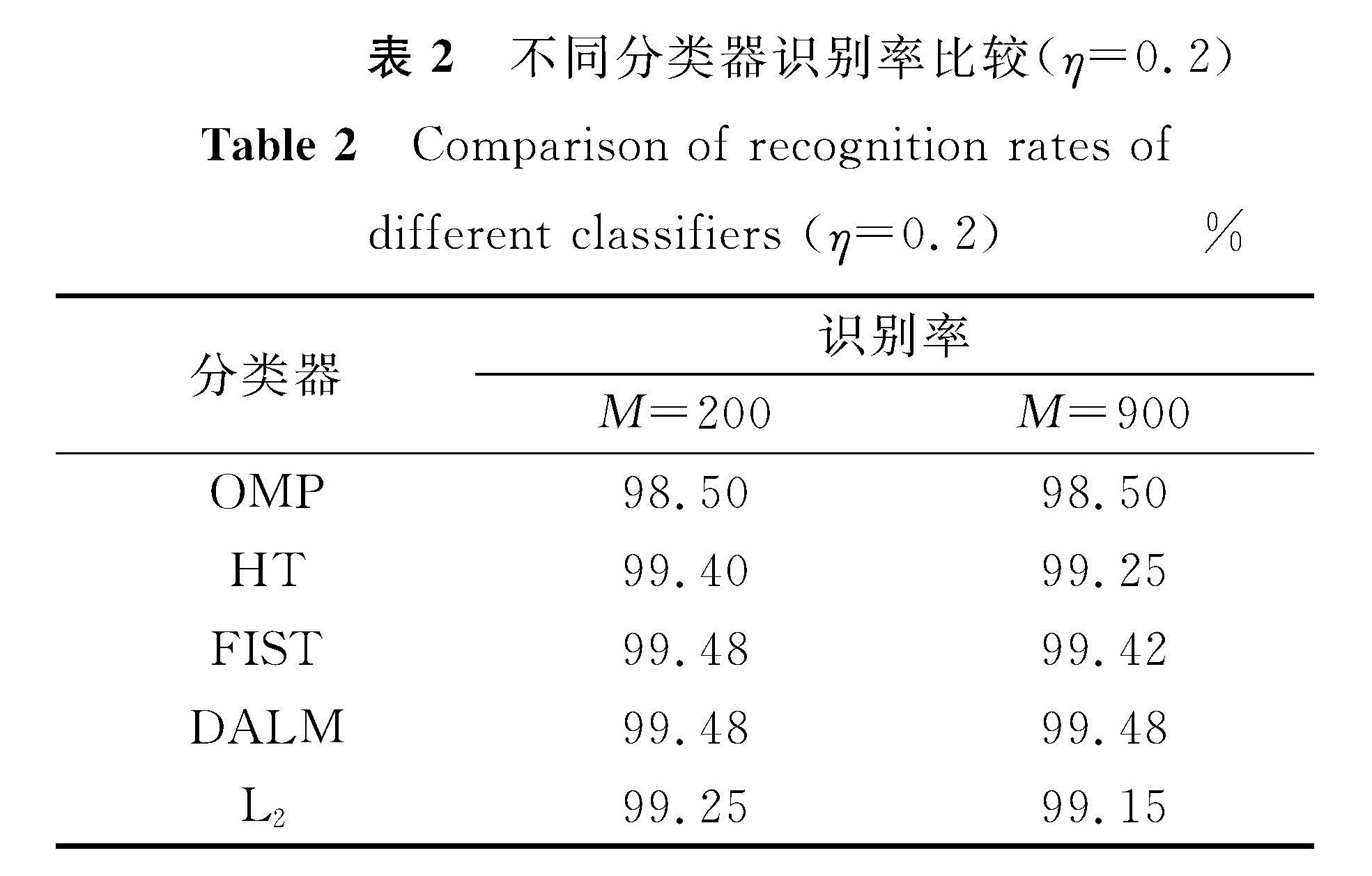
表2 不同分类器识别率比较(η=0.2)
Table 2 Comparison of recognition rates of different classifiers(η=0.2)%
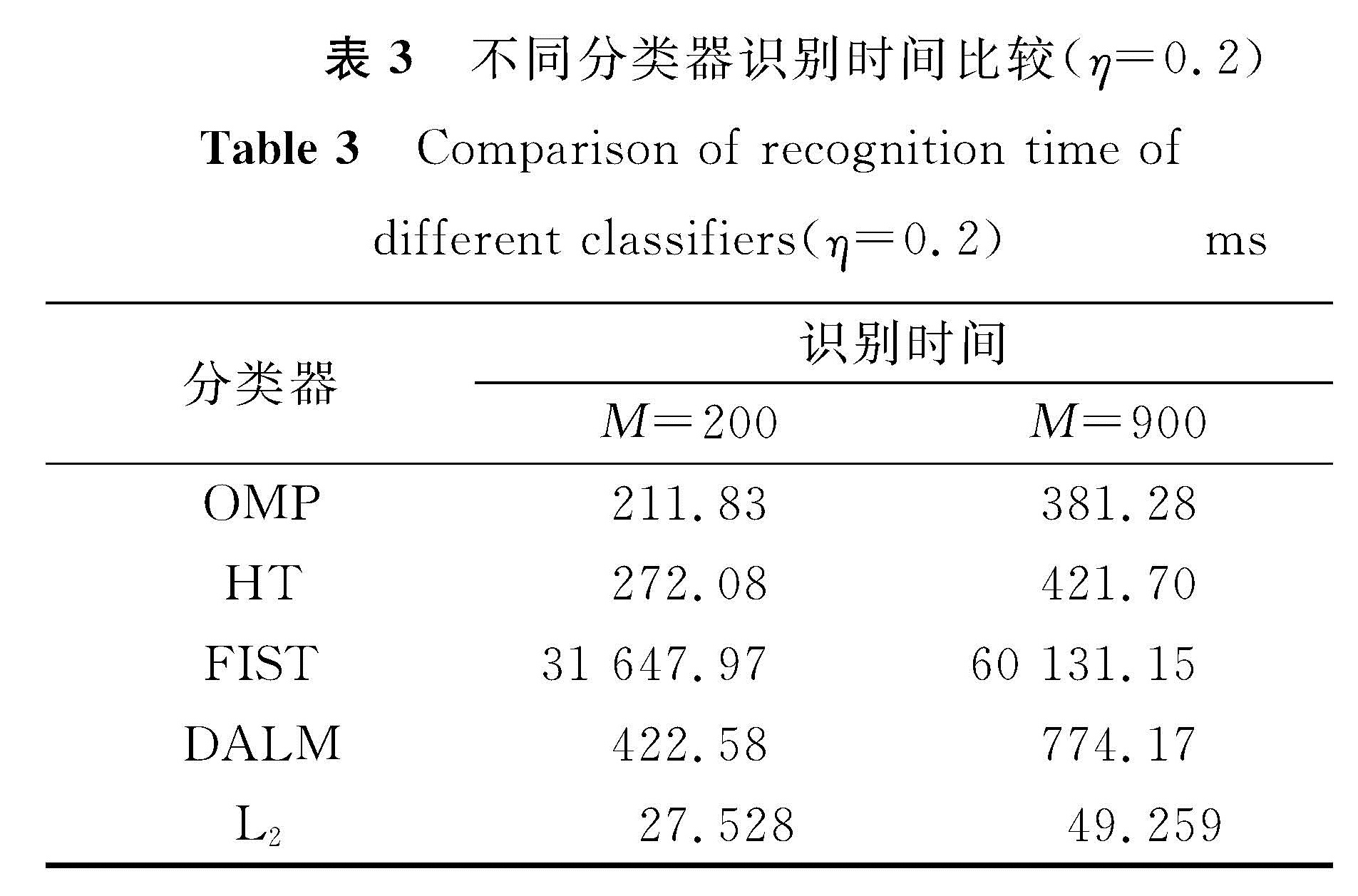
表3 不同分类器识别时间比较(η=0.2)
Table 3 Comparison of recognition time of different classifiers(η=0.2)ms
由表2可见,3D掌纹库对于L1算法的识别率最高,其中DALM和FIST效果最佳,HT其次,下面就是L2范数,OMP近似算法最差,这和稀疏表示解的可靠性基本吻合,同时通过特征优化压缩的识别率比没有压缩的效果有明显提升。
由表3可见,L2算法的速度最快,其次是OMP和HT同伦算方法,后面是DALM和HT,最后是FIST。因此,从识别率和识别时间考虑,DALM和HT是比较好的算法; 在实时要求高的地方,L2范数算法比较合适。通过投影压缩,系统的识别率和实时性也有较大幅度的改善。
5 结 论笔者以优化压缩感知矩阵为基础,提出一种基于压缩感知的3D掌纹识别技术框架。通过稀疏表示对压缩优化的3D掌纹特征进行分类。在3D掌纹库的仿真实验结果显示,基于L1范数的稀疏表示算法有更高的识别率,而L2范数的稀疏表示算法更适合应用于实时要求高的场景中。
- [1] 李春燕,卢光明,黎伟.基于曲面曲率和RLDA的3D掌纹识别方法[J].中国图像图形学报,2011,16(5):807.
- [2] 杨冰,王小华,杨鑫.基于局部纹理特征的三维掌纹识别研究[J].光电工程,2014,41(12):53.
- [3] ZHANG L, SHEN Y, LI H Y, et al. 3D palmprint identification using block-wise features and collaborative representation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(8):1730.
- [4] LI W, ZHANG D, LU G, et al. A novel 3-D palmprint acquisition system[J]. IEEE Transactions Systems Man and Cybernetics,2012,42(2):443.
- [5] TURK M, PENTLAND A. Eigen faces for recognition[J].Journal of Cognitive Neuroscience,1991,3(1):71.
- [6] YU H, YANG J. A direct LDA algorithm for high-dimensional data: with application to face recognition[J]. Pattern Recognition,2001,34(10):2067.
- [7] SWETS D L, WENG J. Using discriminate eigen features for image retrieval[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1996,18(8):831.
- [8] DONOHO D L. Compressed sensing[J]. IEEE Transactions on Information Theory,2006,52(4):1289.
- [9] CANDES E J, WAKIN M B. An introduction to compressive sampling[J]. IEEE Signal Processing Magazine,2008,25(2):21.
- [10] WRIGHT J, YANG A Y, GANESH A, et al. Robust face recognition via sparse representation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2009,31(2):210.
- [11] YU A H, BAI H, JIANG Q R, et al. Multi-objects classification via optimized compressive sensing projection[C]//International Conference on Information, Communications and Signal Processing. Taibei: IEEE,2014:1.
- [12] LI G, ZHU Z, YANG D. On projection matrix optimization for compressive sensing systems[J]. IEEE Transactions on Signal Processing,2013,61(11):2887.
- [13] SNELICK R, ULUDAG U, MINK A, et al. Large-scale evaluation of multimodal biometric authentication using state-of-the-art systems[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2005,27(3):450.
- [14] BESLAND P J, JAIN R C. Segmentation through variable-order surface fitting[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,1988,10(2):167.
- [15] FLUSSER J, ZITOVA B, SUK T. Moments and moment invariant in pattern recognition[M]. Hoboken, New Jersey: Wiley Publishing,2009.
- [16] YANG A Y, SASTRY S S, GANESH A, et al. Fast L1-minimization algorithms and an application in robust face recognition: a review[C]//IEEE International Conference on Image Processing. Las Vegas: CSREA Press,2010:1849.
- [17] ASIF M S,ROMBERG J. Sparse signal recovery of streaming signals using L1-homotopy[J]. IEEE Transactions on Signal Processing,2013,62(16):4209.
- [18] YANG J, ZHANG Y. Alternating direction algorithms for L1-problems in compressive sensing[J]. SIAM Journal on Scientific Computing,2011,33(1):250.
- [19] BECK A, TEBOULLE M. A fast iterative shrinkage thresholding algorithm for linear inverse problems[J]. SIAM Journal on Imaging Science,2009,2(1):183.
- [20] ZHANG L, YANG M, FENG X. Sparse representation or collaborative representation: which helps face recognition[C]//International Conference on Computer Vision. Washington: IEEE Computer Society,2011:471.
- [21] ZELNIK M L, ROSENBLUM K,ELDAR Y C. Sensing matrix optimization for block-sparse decoding[J]. IEEE Transactions on Signal Processing,2011,59(9):4300.
- [22] CLEJU N. Optimized projections for compressed sensing via rank-constrained nearest correlation matrix[J]. Applied and Computational Harmonic Analysis,2014,36(3):495.
- [23] YU A H, BAI H, SUN B B, et al. Face recognition based on optimized projections for distributed intelligent monitoring systems[J]. International Journal of Distributed Sensor Networks,2016,10(4):1155.