 图 1 以前轮转角为变量的内轮差计算
Fig.1 Calculation of inner wheel difference with front wheel angle as variable
图 1 以前轮转角为变量的内轮差计算
Fig.1 Calculation of inner wheel difference with front wheel angle as variable
ZHOU Lei,HU Qinru,GONG Shuchen,et al.Design of a vehicle warning device based on the inner wheel difference[J].Journal of Zhejiang University of Science and Technology,2018,31(05):429-434.[doi: 10.3969/j.issn.1671-8798.2018.05.013]

为了减少汽车转弯时因存在内轮差而与行人或车辆发生碰撞事故,特建立理论模型计算内轮差。以大运N8V重卡复合型8×47.6 m自卸车为例,研究不同转角下内轮差的大小; 设计一种警示装置,与转向盘转动角度建立联系,建构控制系统,选择遮光板材料,由转向盘转动角度来控制遮光板的移动距离。警示装置安装在汽车车身侧面,在汽车转弯时通过转向盘调整遮光板的位置,照亮由内轮差形成的危险区域,以警示行人和车辆。本研究可使汽车警示装置更直观准确地标识汽车危险区域,从而强化警示作用。
In order to reduce the collision incidence with pedestrians or vehicles due to the inner wheel difference during cornering, a theoretical model is established to calculate the inner wheel difference. Taking Dayun N8V heavy truck compound 8×47.6 m dump truck as an example, the paper explores the inner wheel difference at different turning angles, in which a warning device is designed to establish a connection with the rotation angle of the steering wheel and construct the control system. The system selects the shading plate material and controls the moving distance of the shading plate with the rotation angle of the steering wheel. The warning device is installed on the side of the car body. While the car is cornering, the position of the shading plate is adjusted by the steering wheel to illuminate the dangerous area formed by the internal wheel difference, so as to warn pedestrians and vehicles. This study can make the design of automobile warning device more intuitive to more accurately identify the automobile dangerous area and strengthen the warning role.
随着中国物流量的加大,大型货车数量也迅猛增加。由于大型货车的车身较长,转弯时其前后轮的运行轨迹不同,形成较大的内轮差,由此产生危险区域,进入这个区域的行人和非机动车很容易被车身后半部卷入,导致严重的交通事故。据不完全统计,在大型车辆发生的恶性交通事故中,内轮差引发的事故占70%以上,绝大多数发生在车辆右转弯时,事故死亡率高达90%以上[1]。
内轮差即车辆转弯时内前轮转弯半径与内后轮转弯半径之差。关于汽车内轮差的研究在理论上已取得了一些成果,如:褚正清等在货车右转弯内轮差的研究中通过假设汽车转弯轮迹为圆弧对不同类别的车辆建立了3个数学模型,计算内轮差并分析了内轮差与转弯半径和转角的关系[2]; 王睿弩等将车辆分为非拖挂车和半挂车计算内轮差,并通过FORUM8仿真模拟出车辆右转弯真实内轮差区域,同时也从交通设计者和管理者角度提出了如何避免因内轮差的存在而发生的交通事故[3]; 李逸良等运用刚体运动学的相关概念和知识,更加准确地定量模拟出汽车转弯的轮迹线,计算出不同转弯半径下的最大内轮差[4]。虽然为了消除安全隐患,汽车安全警示装置也融入新材料新技术并进行研发与更新,以增强警示功能,但是将内轮差纳入汽车安全警示系统设计仅有一些概念与思路。如钟策设计出了一种由单片机、舵机和一字激光灯组成的警示灯,但是因为是直线灯光线且只有最外侧的轮廓,所以指示的区域与实际情况有较大的偏差[5]; 冯嘉明在一种大型车辆内轮差警示装置发明专利中描述了主要由信息收集系统、激光发射系统和语音提示系统等构成的报警装置的工作流程[6]。FAIRWOOD INNOVATION等研究认为汽车安全报警系统装置由一个或者多个灯组成,在转弯时检测到行人就亮起,没有行人就不亮[7],但该装置只能起到指示作用,并不能明确地指示出内轮差的区域。而Todd Ruff等则研究通过雷达监测危险区域然后报警[8],但由于成本过高而难以应用。基于已有研究成果,笔者试将汽车内轮差原理运用于汽车安全警报系统设计中,探究一种通过灯光准确标识内轮差危险区域来警示大型车辆旁的行人和其他车辆,以期完善汽车安全警报设置系统设计。
1 警示装置设计的功能需求与结构特点1.1 功能需求由汽车内轮差而导致的汽车转弯时的危险区域常被司机与行人忽视,因此基于汽车内轮差的警示装置,需要完成以下功能:1)警示装置需要让司机在转弯时消除视觉盲区,提高车辆运行警戒意识,通过转向盘的转动角度、制动等控制消除危险区域存在的安全隐患。2)警示装置能对汽车转弯时内轮差危险区域实施有效标识,当汽车在行进转弯时警示灯开启,照亮车辆转弯内轮差引起的危险区域,让行人与车辆适时识别内轮差危险区域,进而实施规避行动,远离危险区域。3)警示装置能解决目前通过转向灯与相应的语音提示警示的不精确性,在车身两侧都能通过安装的警示灯来提高警示设置功能的效果。
1.2 结构特点大货车在任何环境下转弯都存在内轮差,这要求内轮差警示装置结构必须在任何情景下均能发挥警示作用,由此警示装置的结构应具备以下特点:1)通过信息采集模块、系统控制模块与组织结构模块实现装置系统与真实世界的联系,即整个装置警示识别功能要适应大货车任何转弯环境,如雨雪天气、山区、城市、昼夜等。2)警示装置对危险区域外部传达必须符合行人与其他车辆驾驶员的认知特点,在选用具有高警示度的信号作用于人们的认知心理的同时,也要符合人们的安全认知诉求与人性化心理需求。3)警示装置只是汽车构造中一个小的功能模块,既要实现自身功能需求,做到性能良好、安全耐用、美观合理,又要与汽车其他部件衔接以构成完整的汽车构造运行系统,因此要做到衔接紧凑、操作便捷、灵活高效。
2 警示装置的结构组成与设计原理警示装置设计需要完成警示灯的触发及关闭、警示灯照射区域的确定及警示灯的控制设计。
2.1 警示灯的触发及关闭原理根据转向灯的工作原理,将警示灯的触发电路设计成并联电路。一条线路与转向灯相连,在驾驶员开启转向灯的同时警示灯也亮起; 另一条线路与转向盘相连,若驾驶员未开启转向灯,则可通过传感器监测转向盘转动角度来控制警示灯亮起。当完成转向后,若转向灯开启就通过自动回位系统使转向灯和警示灯一同熄灭; 若转向灯未开启,则根据传感器监测使警示灯熄灭。
2.2 内轮差理论模型计算确定警示灯照亮的危险区域首先需要计算大型车辆的内轮差范围,以汽车前轮转角为变量,假设汽车在转弯过程中不变形即为一刚体,将车辆作为一个整体进行简化,如图1所示。假设汽车转弯时前后轮轮迹均为圆弧,且都以O点为圆心,将汽车的4个车轮标记为A、B、C、D,图中:l为前后轮轴距,m; d为车轮横向轮距; OD长为r1; OC长为r2; 汽车前轮转角θ的范围为0°<θ <60°。
图1 以前轮转角为变量的内轮差计算
Fig.1 Calculation of inner wheel difference with front wheel angle as variable
基于以上假设,汽车转弯时的内轮差可以表示为m=r1-r2,m; 在三角形OCD中r1=l/(sin θ),r2=l/(tan θ),从而得到内轮差m与前轮转角θ之间的关系公式为:
m=(l(1-cos θ))/(sin θ)。(1)
2.3 警示灯的控制原理将遮光板通过线路与转向盘相联,随着转向盘的转动而移动一定的距离,把不需要的光线遮挡住,余下部分的光线就能射到地面上照射出内轮差的区域范围。首先需要确定汽车前轮转角θ与遮光板移动距离的关系。汽车前轮转角θ在汽车转弯过程中是不断变化的,从0到最大值再到0; 内轮差的区域也随着汽车转弯从小范围到最大范围,再到小范围,最终为零,所以相应的遮光板移动距离从0到最大值再回到初始状态。其次需要将遮光板角度与传动相连。经过测试和计算,不同汽车的转向传动比(转向盘转向程度与车轮转向程度之比)是不同的。轿车的转向传动比在10:1和24:1之间,即转向盘转动10°到24°,车前轮转动1°; 大货车的转向传动比在14:1和35:1之间。选择大货车作为研究对象,并认为大货车的转向盘转动角度在0°到900°之间,分别按照14:1和35:1的传动比计算可以得到相应的大货车前轮转动角度在26°到64°之间,所以选取转向盘转动角度与前轮转角比为15:1,若转向盘转动角度0°~540°,则前轮转角θ对应的角度是0°~36°。由此,通过转向盘转角控制车轮转向范围,再由转向盘转角连动遮光板的位移,标识危险区域。
3 实例分析应用上述原理,以大运N8V重卡复合型8×47.6 m(车轮前4个后8个,货箱长度7.6 m)自卸车为例,对警示装置进行设计,参见图2,警示灯位于汽车侧边黄色方块标识处(正方形框内)。
图2 警示灯位置
Fig.2 Warning light position
以前轮转角θ为变量,运用式(1)计算其内轮差,具体见表1。由表1可知,车辆的前轮转角越大内轮差就越大,危险区域的范围也就越大。因此,内轮差范围就是警示灯需要照亮的区域。现选取一款满天星式激光灯(Laser Pointer YL851),假设遮光板紧挨着激光发射器出口(两者之间的距离忽略不计),该激光发射器出口为直径5 mm的圆,为方便计算将其简化为边长为5 mm的正方形。经试验测得照亮区域为边长2.8 m的正方形,所以得到实际照射范围边长与出口边长的比值为560:1。选取2.2理论计算特例中的大运N8V重卡车辆的最大内轮差值为2.62 m,根据560:1的比值计算得遮光板移动的最大距离为4.7 mm,小于5.0 mm。
计算转向盘转动角度和遮光板移动距离的关系,结果见表2。
表1 以前轮转角为变量内轮差计算
Table 1 Calculation of inner wheel difference with front wheel angle as variable
表2 转向盘转动角度和遮光板移动距离的关系
Table 2 Relationship between rotation angle of the steering wheel and moving distance of the shading plate
3.1 控制系统设计
汽车警示装置可利用转向角度传感器探测转角,并通过单片机和步进电机最后将转向角度的信号转变为遮光板移动的尺寸,具体流程如图3所示。
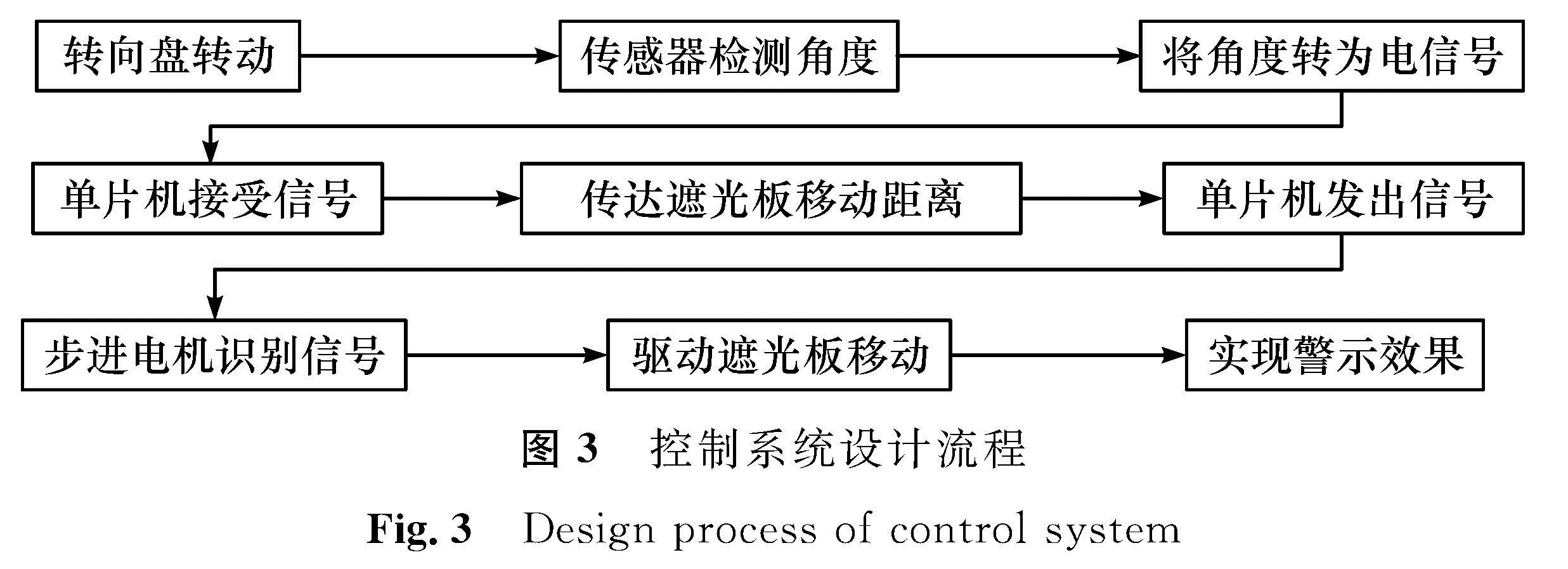
图3 控制系统设计流程
Fig.3 Design process of control system
3.1.1 信号采集
以角度传感器作为信号监测和采集系统的主要部件。当驾驶员转动转向盘时,角度传感器实时监测转向盘转动角度并将其转换成电信号传递到处理系统从而控制警示灯的工作和遮光板的移动。角度传感器主要有机械式、霍尔式、电磁感应式、编码器式、磁电阻式等,相比之下,磁电阻式角度传感器具有构造简单、性能稳定,可实现实时监测和非接触式测量等优点,它又分为各向异性磁电阻和巨磁电阻,由于基于各向异性磁电阻的角度传感器测量范围较小(通常在0°~180°),所以本装置采用测量范围较大的巨磁电阻角度传感器[9]及其他相关硬件作为信号采集模块的部件。
3.1.2 信号处理与执行在信号执行与处理系统中选用单片机和步进电机作为主要部件。单片机将从传感器传来的电信号转换成计算机语言,经过存储处理后再将信号传递给执行系统执行相应指令,进而在汽车转弯时对遮光板移动进行动态调节,使步进电机将电信号转变为遮光板的线位移,使得遮光板可以不断地移动,从而达到预定的照射效果。
步进电机分为反应式、永磁式和混合式,其中混合式步进电机结合了反应式和永磁式的优点,输出力矩大、动态性能好,而在混合式步进电机中,两相混合式步进电机因其性价比较高,使用效果好,占据了较大的市场份额[10]。由于本装置需要步进电机带动遮光板移动,遮光板的体积小、质量轻,因此所需要的扭力较小,通常在0.8 N·m以下,所以选择42电机较为合适。表3是转矩为0.31 N·m的4种42步进电机相关参数。在生产实践中可根据具体需求选择或定制合适的步进电机。
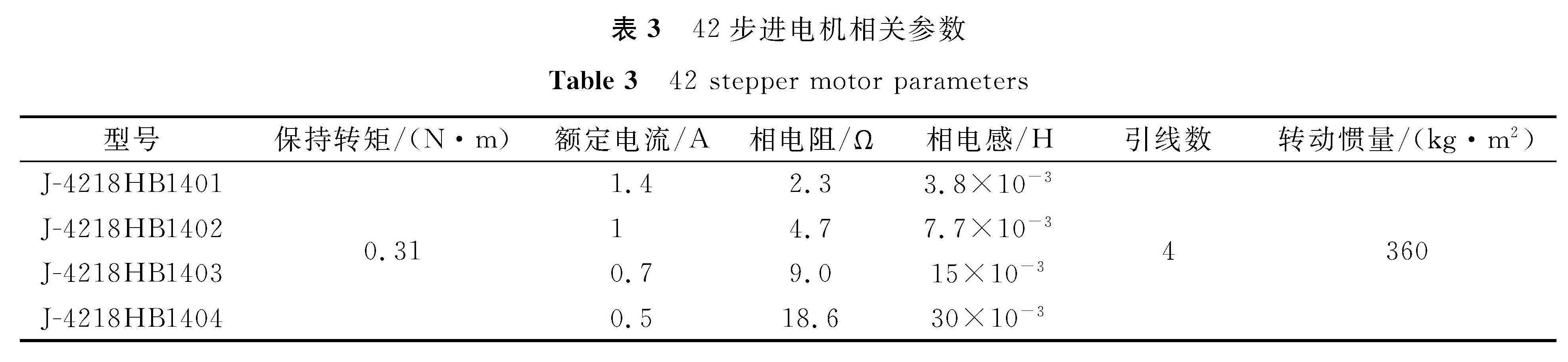
表3 42步进电机相关参数
Table 3 42 stepper motor parameters
3.2 警示装置外观设计
根据上述流程,初步设计出以下装置模型,见图4。
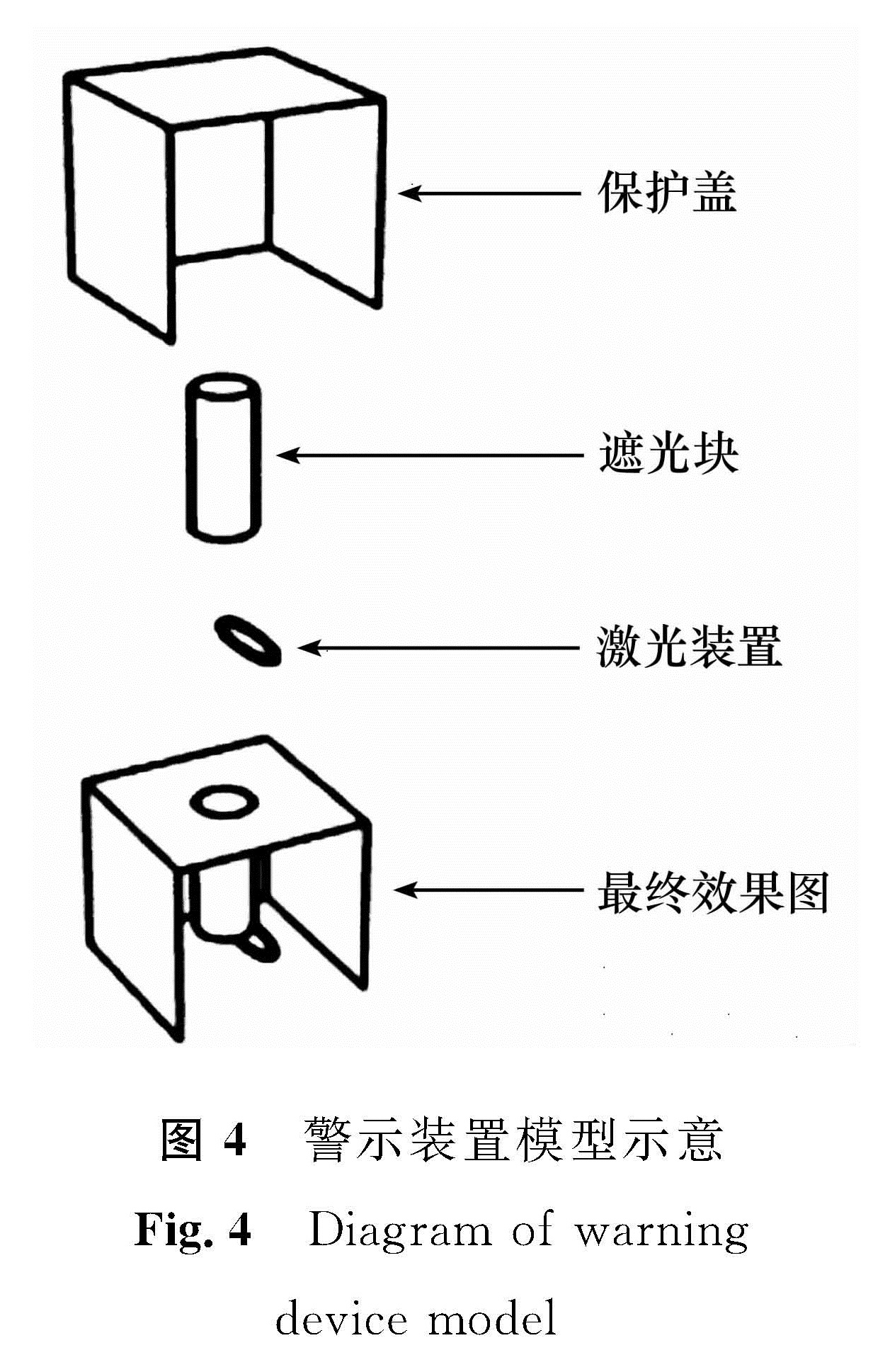
图4 警示装置模型示意
Fig.4 Diagram of warning device model
3.2.1 警示灯灯光颜色设计
颜色具有进退性,暖色为前进色,冷色为后退色。人们把容易产生较近距离感的颜色,如红色和黄色等称为前进色,而产生较远距离感的颜色,如蓝色和绿色称为后退色[11]。相对后退色而言前进色的视认性更佳。因此,警示装置宜选用前进色(暖色)灯光。在暖色中,红色起到突出强调的作用,容易引起人们的注意,使行人能够快速意识到危险。在现有的交通标志标线中,大部分警示标志都采用了红色的文字或图像,因此当警示灯启用时,行人也能遵循自己的固有心理,从而避开红色灯光覆盖的危险区域。
3.2.2 警示灯材料选择与处理为了使警示灯在任何环境下都能传达其警示信息,对警示灯材料的选择必须与汽车大灯配光镜相似,即具有UV(ultravioletray)稳定性和高透明性。现在市面上的配光镜大多采用聚碳酸酯(polycarbonate)材料注塑成形的,它具有良好的抗冲击、抗热畸变及透光性能,而且耐候性好、硬度高,适用于生产轿车和轻型卡车的各种零部件[12]。因此,选择价格经济、透光率高的透明聚碳酸酯面板可满足警示装置的功能需求。为了防止雾气影响灯光效果,警示灯内表面应安装透气薄膜,它有助于促进车灯内外部气体交换,同时能满足不让灰尘和水等侵入车灯的要求。透气薄膜包含一种Gortex(聚四氟乙烯)的材料,它有很细的孔可允许空气分子通过,但不会让水或者其他液体、灰尘及杂物通过[13]。由于长时间暴露在阳光下,警示灯装置的外表面需要防止紫外线的侵蚀,可在其外表面上喷涂聚氨酯紫外光固化涂料(UV涂料)来达此目的。这种涂料具有不含挥发性有机化合物(volatile organic compounds),对环境污染小,固化速度快,节省能源,固化产物性能好,适合于高速自动化生产等优点[14]。
3.2.3 警示灯的光源选择基于行车环境,普通灯光在阳光下、雪地里、水坑表面等条件下无法被行人及非机动车准确识别,难以明确标识并传达出危险区域,而激光具有单色性好、相干性好、方向性好、亮度高等优点[15],不会受恶劣天气条件的影响,因此选用满天星式激光灯,可使照射区域为平面,能在地面上清晰地投影出危险区域范围,易于行人和车辆的辨别; 且激光的穿透力强,在白天和雨雾天气也能照射出清晰的内轮差范围。
3.2.4 遮光板的设计及材料选择使用遮光板能够将多余的光遮住,从而使得呈现出的投影是内轮差危险区域标识所需要的形状,并与内轮差区域吻合; 同时通过遮光板随着转向盘的转动而动态地移动,可以实现在车辆不同转弯半径的情况下,照射范围随着车辆运动状态而改变,更贴近于实际,适用率大为提高。通过比较并考虑到生产的简易性和可操作性,警示装置选取椭圆作为遮光板的初始线型,在生产应用中可根据具体的汽车类型进行设计修改。黑色碳化硅陶瓷不仅具有优良的常温力学性能,而且其高温力学性能是已知陶瓷材料中最佳的[13]。由于遮光板需要吸收激光将光能转换为热能,遮光板的材料应具有良好的耐高温性和耐久性。因此,遮光板材料选择黑色碳化硅陶瓷,不仅能够有效地遮住部分激光,而且耐高温、寿命长、价格低廉。
4 警示装置的效用分析基于汽车内轮差的警示装置设计是通过汽车,尤其是大型货车转弯环境实际情景分析,从安全诉求出发而对警示装置每一环节进行的个性化设计,其效果如图5所示。警示装置的可行性在于其具有“发于内而行于外”,其外部传达的动态信号能有效反映设备的动态运行内在特性[16]。
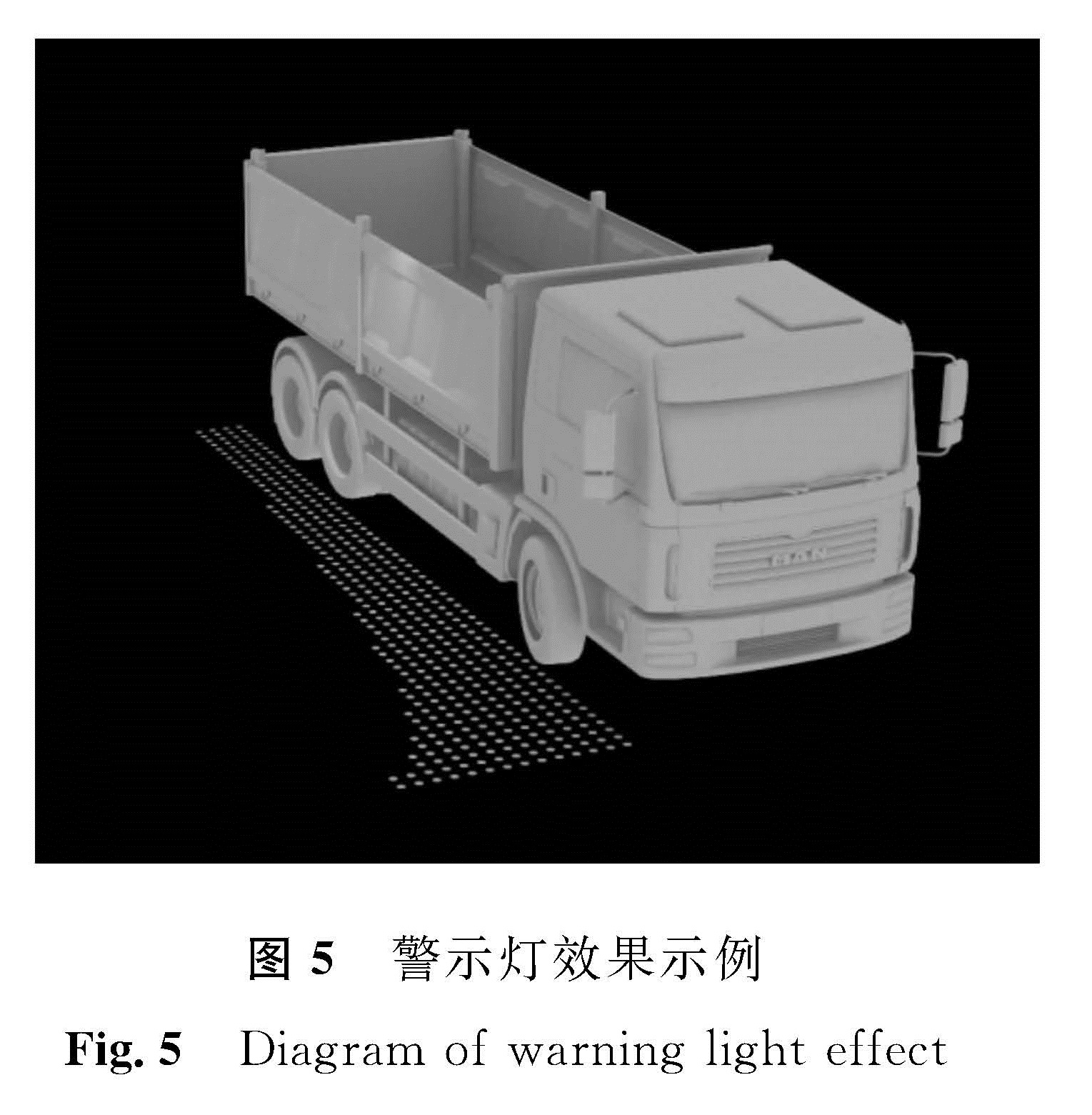
图5 警示灯效果示例
Fig.5 Diagram of warning light effect
为了检验警示装置设计的可行性与效用,即警示装置在内轮差区域内准确地传达危险信号,对行人或其他机动车辆实现明确的警示功能,笔者对骑行人员作访谈调研,受访者认为,基于汽车内轮差警示装置的设计能够更准确地标识汽车,尤其是货运汽车转弯时的危险区域,起到更为直观与准确的警示作用。
5 结 论基于汽车内轮差的警示装置可在很大程度上减少汽车转弯时交通事故的发生,而且该装置选材实用、价格低廉、适用车型较多,因此有较好的推广前景。在实际应用中还可以加入现有研究和专利中的内轮差报警装置,即通过红外感应监测内轮差区域中的人和物体并发出声音警告,以提醒转弯车辆的驾驶员减速慢行。若将本装置和报警器相结合,不仅使行人和车辆提前预知危险区域,而且还能使已经处在危险区域中的行人和车辆通过光和声的警示及时撤离,同时转弯车辆驾驶员也能一并减速行驶甚至停车,这样就更加全面地保障了行人和车辆的安全。
- [1] 亚麦.大货“内轮差”再夺命 不要图省事占内侧车道[EB/OL].(2016-04-25)[2018-03-20].http://www.qdxin.cn/qingdao/2016/71279.html.
- [2] 褚正清,刘家保,宋星.货车右转弯内轮差的建模研究[J].河北北方学院学报(自然科学版),2015(5):49.
- [3] 王睿驽,钱红波,谭学飞,等.基于道路转弯半径的内轮差计算及安全对策[EB/OL].(2014-03-20)[2018-03-05].https://image.hanspub.org/pdf/OJTT20140300000_77283091.pdf.
- [4] 李逸良,邱信明.汽车转弯时内轮差的运动学理论模型[J].力学与实践,2017,39(1):94.
- [5] 钟策.大型车辆转弯安全警示灯设计研究[D].成都:西南交通大学,2016:28.
- [6] 冯嘉明.一种大型车辆内轮差安全警示装置:CN206749650U[P].2017-12-15.
- [7] FAIRWOOD INNOVATION A/S. A warning system for a turning vehicle and a vehicle comprising such a warning system:CA2928301[P].2015-04-30.
- [8] RUFF T. Evaluation of a radar-based proximity warning system for off-highway dump trucks[J].Accident Analysis and Prevention, 2006, 38(1):92.
- [9] 饶晓俊.基于巨磁电阻效应的角度传感器研究[D].合肥:合肥工业大学,2011:25.
- [10] 郭豪,赵树忠.基于单片机的步进电机控制[J].机械工程与自动化,2018(1):169.
- [11] 徐良杰,铁文君,奚少新.基于路面色彩信息的驾驶员视觉心理效应分析[J].武汉理工大学学报(交通科学与工程版),2016,40(4):592.
- [12] 王铁城,钱国刚,黄炘,等.前照灯配光镜材料光源辐照及耐化学试剂测试研究[J].中国塑料,2010,24(6):58.
- [13] 纪丽,黄强,周震杰.高分子材料在车灯中的应用与发展[C]//中国汽车工程学会年会论文集.重庆:中国汽车工程学会,2015:992.
- [14] 高倩,杨培凤,胡卫雅,等.抗紫外线涂料研究进展[J].化工生产与技术,2011,18(2):33.
- [15] 关靖雯.激光灯在未来汽车照明中的应用前景[J].汽车维修,2015(6):6.
- [16] 何正嘉,曹宏瑞,訾艳阳,等.机械设备运行可靠性评估的发展与思考[J].机械工程学报,2014,50(2):171.