 图 1 快递存取装置模型
Fig.1 Express access device model
图 1 快递存取装置模型
Fig.1 Express access device model
CHEN Linsong,YUAN Bin.Research on express access speed based on fuzzy control[J].Journal of Zhejiang University of Science and Technology,2019,32(05):381-386.[doi:10.3969/j.issn.1671-8798.2019.05.005]

新型带存取装置的快递柜解决了现存快递柜存取数量有限、空间利用率低的问题,但在快递存取速度上还有待提高。借助于模糊控制理论,先利用MATLAB设计了一个模糊控制器; 模糊控制器的输入为快递质量、高度和底面积,输出为电机转速,以此确定不同快递存取过程中匀速时的速度。然后针对快递存取加速阶段设计了模糊PID(proportion integral differential,比例-积分-微分)控制器,借助于MATLAB/Simulink软件进行仿真,并与一般的PID控制进行了比较。结果 表明,加速阶段采用的模糊PID控制方式的系统响应速度快且稳定性高,因此该模糊控制方法有助于提高快递的存取速度。
The new-type express cabinet with access device solves the problems of limited access and low space utilization afflicting the existing express cabinet, but the speed of express access needs to be improved. A fuzzy controller was firstly designed with MATLAB on the strength of the theory of fuzzy control, which selected the mass, height and bottom area of express delivery as input variables and the motor speed as the output variable to determine the speed of different express access processes at uniform speed. Then, a fuzzy PID(proportion integral differential)controller was designed for the acceleration stage of express access. Simulation of the fuzzy PID control was carried out with the help of MATLAB/Simulink software, compared with the general PID control. Results show that the fuzzy PID control method adopted at the acceleration stage boasts fast response speed and high stability, which is proven to improve the speed of express access.
在“互联网+”背景下,快递业获得了良好的发展机遇,并推动了国民经济的提升,同时国外的快递行业也凭借着跨境电商的兴起飞快地成长起来[1-2]。政府为了鼓励快递业的发展,还推行有利的政策以促进快递柜的发展[3]。目前大多数快递柜虽然存取快递都比较方便,但还存在存储数量有限、空间利用率低的不足[4]。因此,人们开始研究新型智能快递柜,以克服现存快递柜的不足。文献[5]设计了一种用于存取快递的智能化立体转动设备; 文献[6]在借鉴立体仓库堆垛机存取货物原理的基础上设计了一种新型的自动快递存取机; 文献[7]开发了一种存取快递仓库来实现寄件功能。为了获得更好的用户体验,新型快递柜要有较快的存取速度,以方便寄存及收取快递。基于此,本文借助于模糊控制算法对快递的存取速度控制进行了研究,旨在提升新型快递柜的存取速度,改善新型快递柜的用户体验感。
1 快递存取装置模型
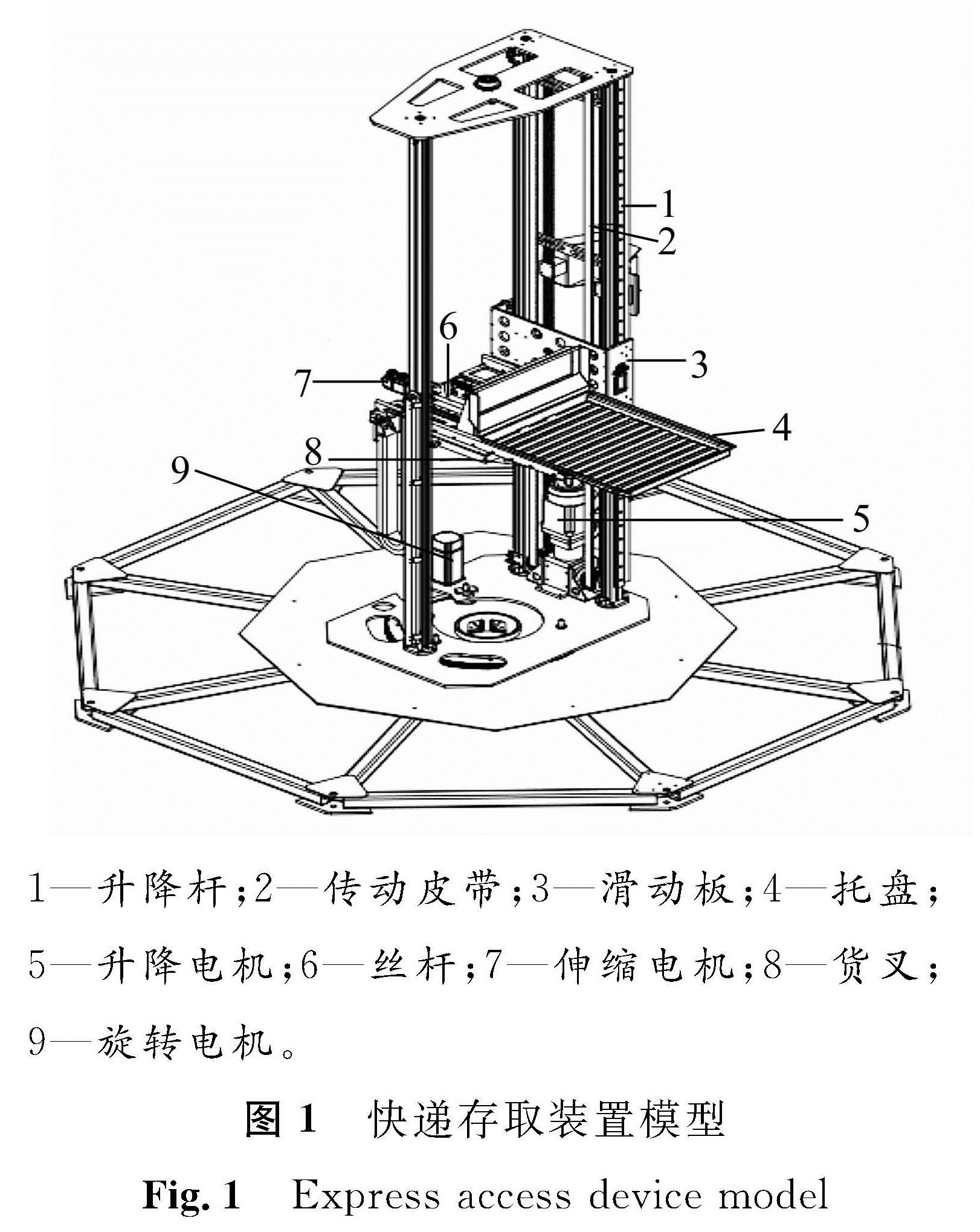
图1 快递存取装置模型
Fig.1 Express access device model
快递存取装置模型如图1所示。存取装置位于快递仓中心,它主要包括货叉、驱动货叉水平移动的平移组件和驱动货叉垂直移动的升降组件。其中,升降组件包括设置在旋转板上的升降杆、竖向设置的传动皮带、驱动传动皮带转动的升降电机及可相对于升降杆竖向滑动的滑动板,滑动板与传动皮带的一处固定,并在传动皮带的带动下相对于升降杆上下移动; 平移组件包括旋转板、驱动旋转板的旋转电机、设置在滑动板上的丝杆、驱动丝杆转动的伸缩电机。存取装置与控制器电连接,货叉与托盘配合使用,托盘置于货叉上。快递存取装置接收到收货指令时,货叉从快递架上取出托盘,放置到存取口,待快递放置到托盘上之后,用货叉叉起托盘,将快递一并拾起,最后将快递连同托盘一起放到快递架上。快递存取一般要经过旋转运动、升降运动和伸缩运动才能完成。
2 快递最佳存取速度确定
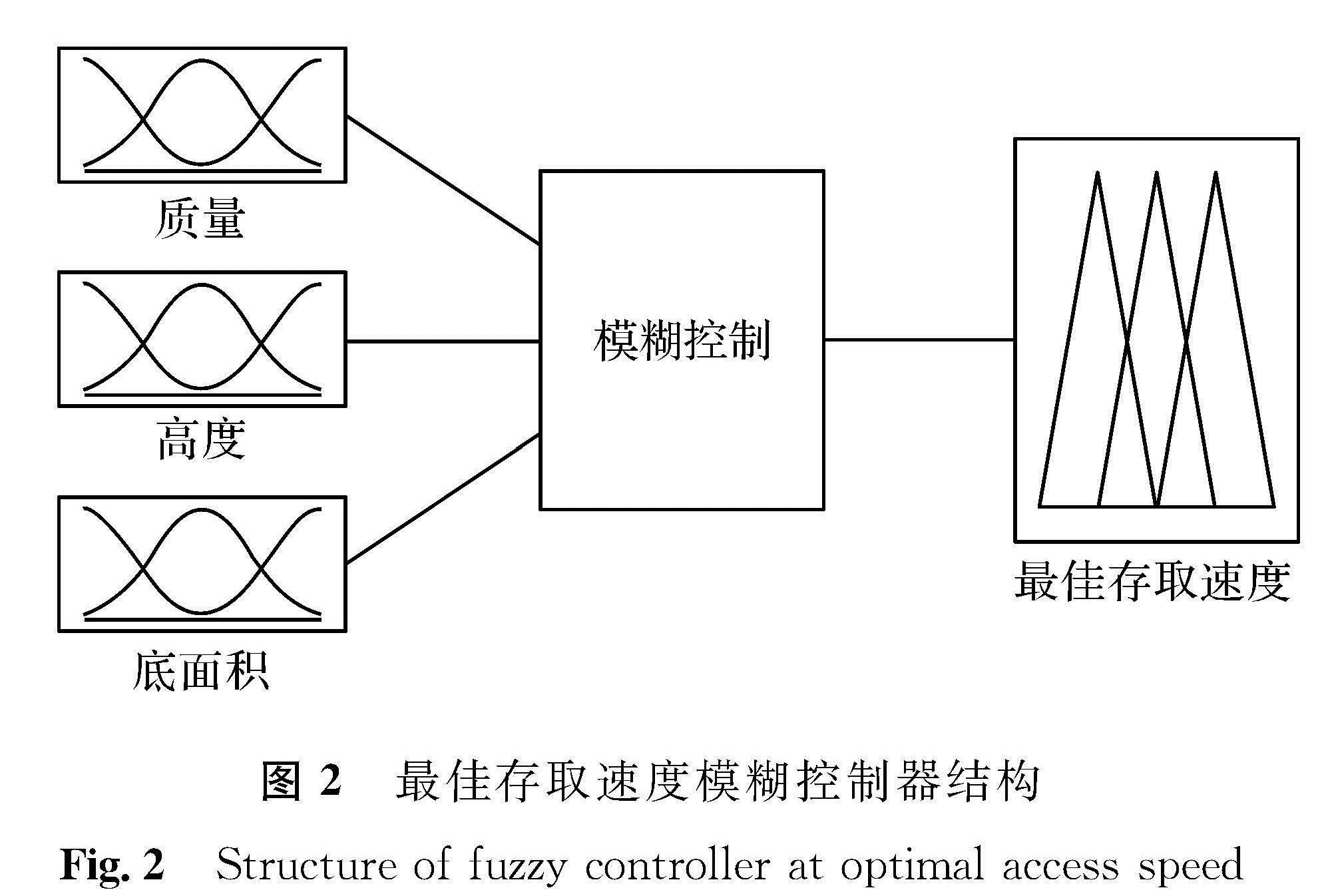
图2 最佳存取速度模糊控制器结构
Fig.2 Structure of fuzzy controller at optimal access speed
确定快递的最佳存取速度涉及模糊控制器的设计。模糊控制器的设计包括:定义模糊控制器的输入输出变量并对其模糊化; 定义各变量的隶属度函数; 建立模糊控制的规则; 模糊输出变量通过一定的方式去模糊化。本文研究的是不同质量、高度及底面积的快递对最佳存取速度的影响,因此设置模糊控制器的输入变量为快递的质量、高度和底面积,而输出变量设置为最佳存取速度。图2是快递的最佳存取速度模糊控制器结构。
隶属度函数的种类很多,选取隶属度函数时需要结合实际情况。一般而言,隶属度函数曲线较平缓,则系统控制性能较平稳但不太灵敏; 而陡峭的隶属度函数曲线能够有助于增强系统的灵敏性[8]。因此隶属度函数曲线一般会根据系统的偏差大小来进行确定,从而保证系统发挥更好的控制效果[9]。本文设置输入变量质量的模糊语言变量为轻、中等和重,其隶属度函数见图3。快递高度的隶属度函数见图4,设置了高低两个模糊语言变量。而底面积的模糊语言变量为小和大,其隶属度函数曲线形状与输入变量高度的形状相同。
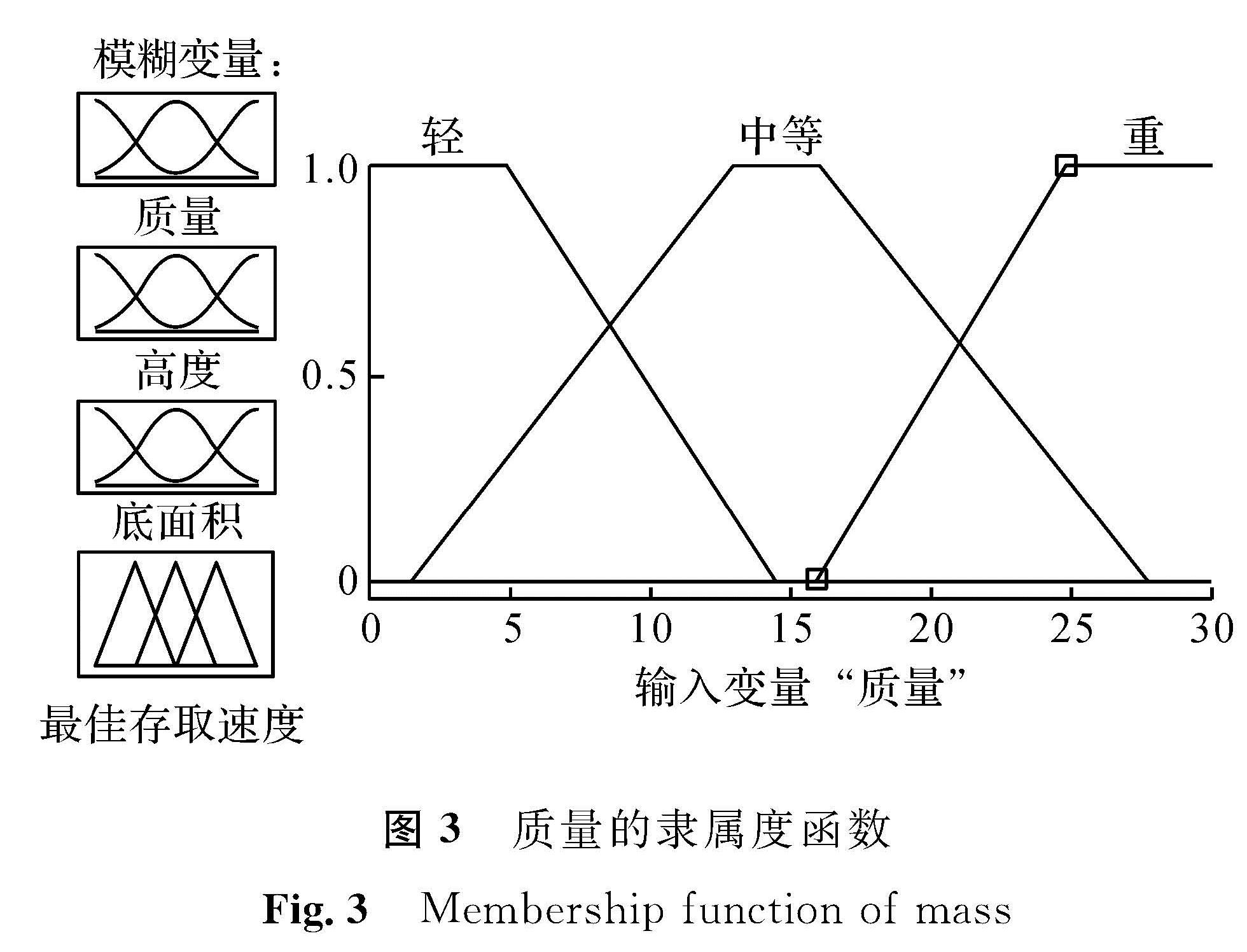
图3 质量的隶属度函数
Fig.3 Membership function of mass
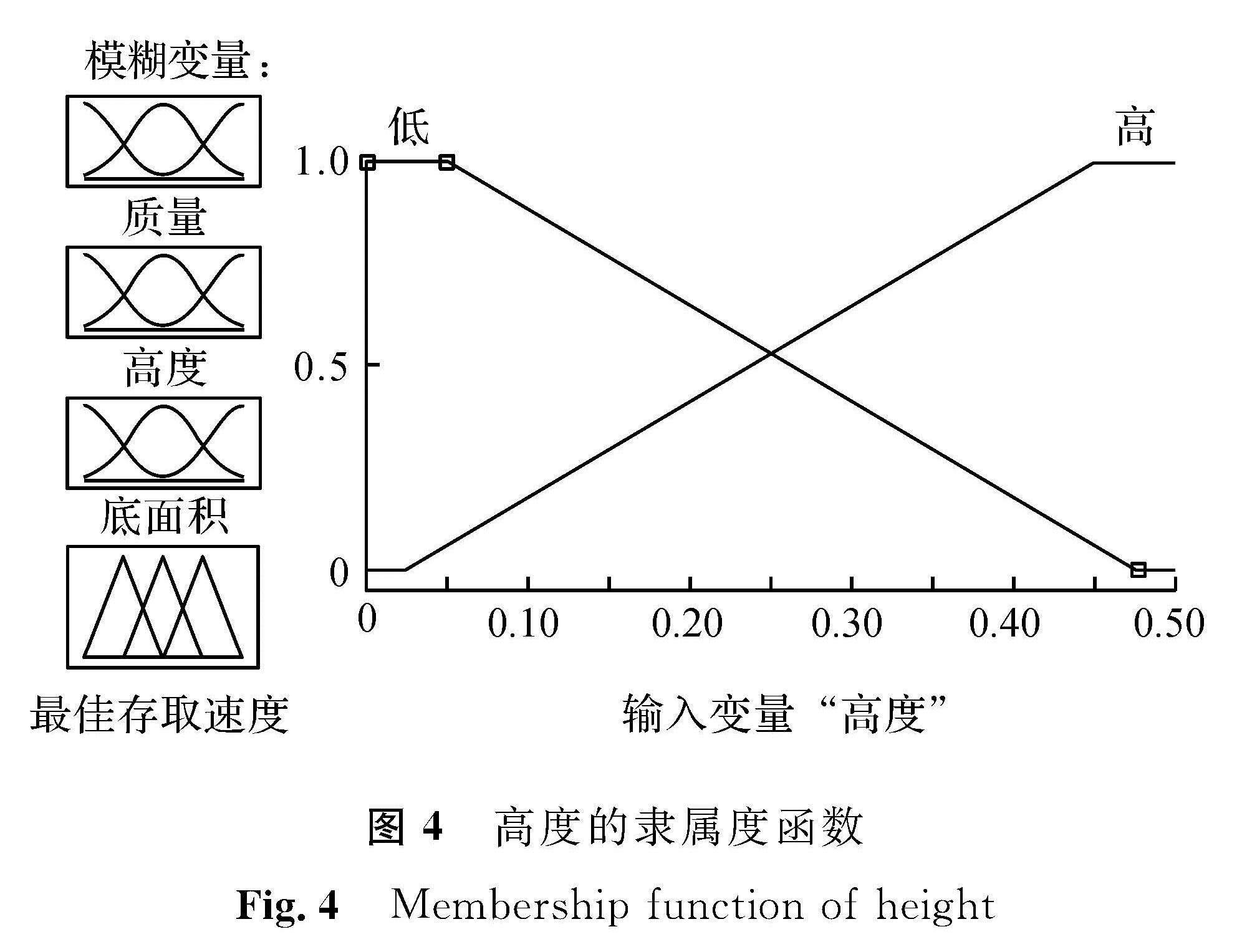
图4 高度的隶属度函数
Fig.4 Membership function of height
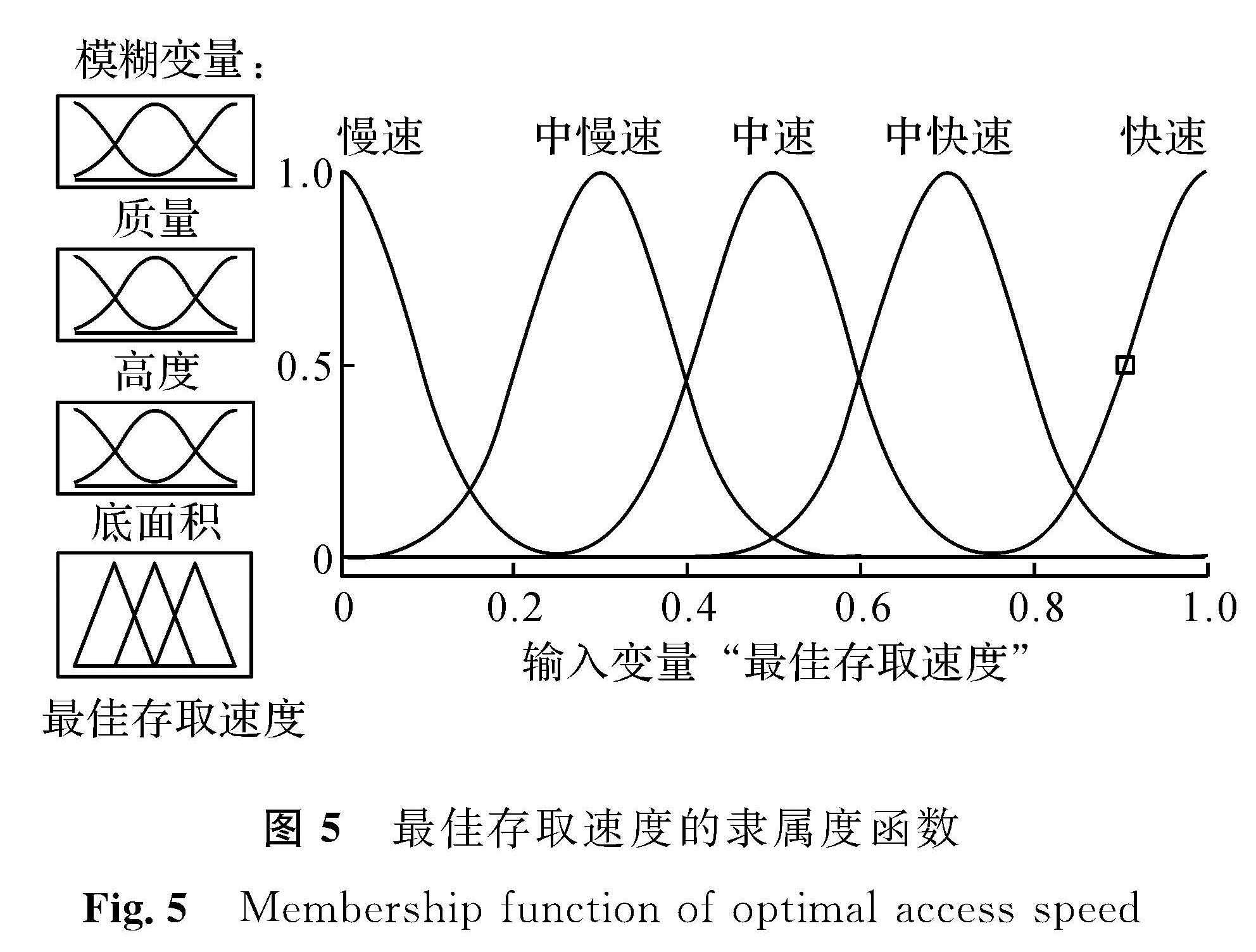
图5 最佳存取速度的隶属度函数
Fig.5 Membership function of optimal access speed
最佳存取速度的模糊语言变量是慢速、中慢速、中速、中快速以及快速,其隶属度函数见图5。
最佳存取速度的模糊控制规则见表1。模糊控制的输出不可以直接应用在执行机构上,还需要对其进行解模糊。解模糊方法有重心法、最大隶属度法、面积等分法等,本文采用的是重心法。重心法也叫加权平均法,其计算公式为:
u=(∫xμN(x)dx)/(∫μN(x)dx)。(1)
式(1)中:μN(x)为x处的隶属度。
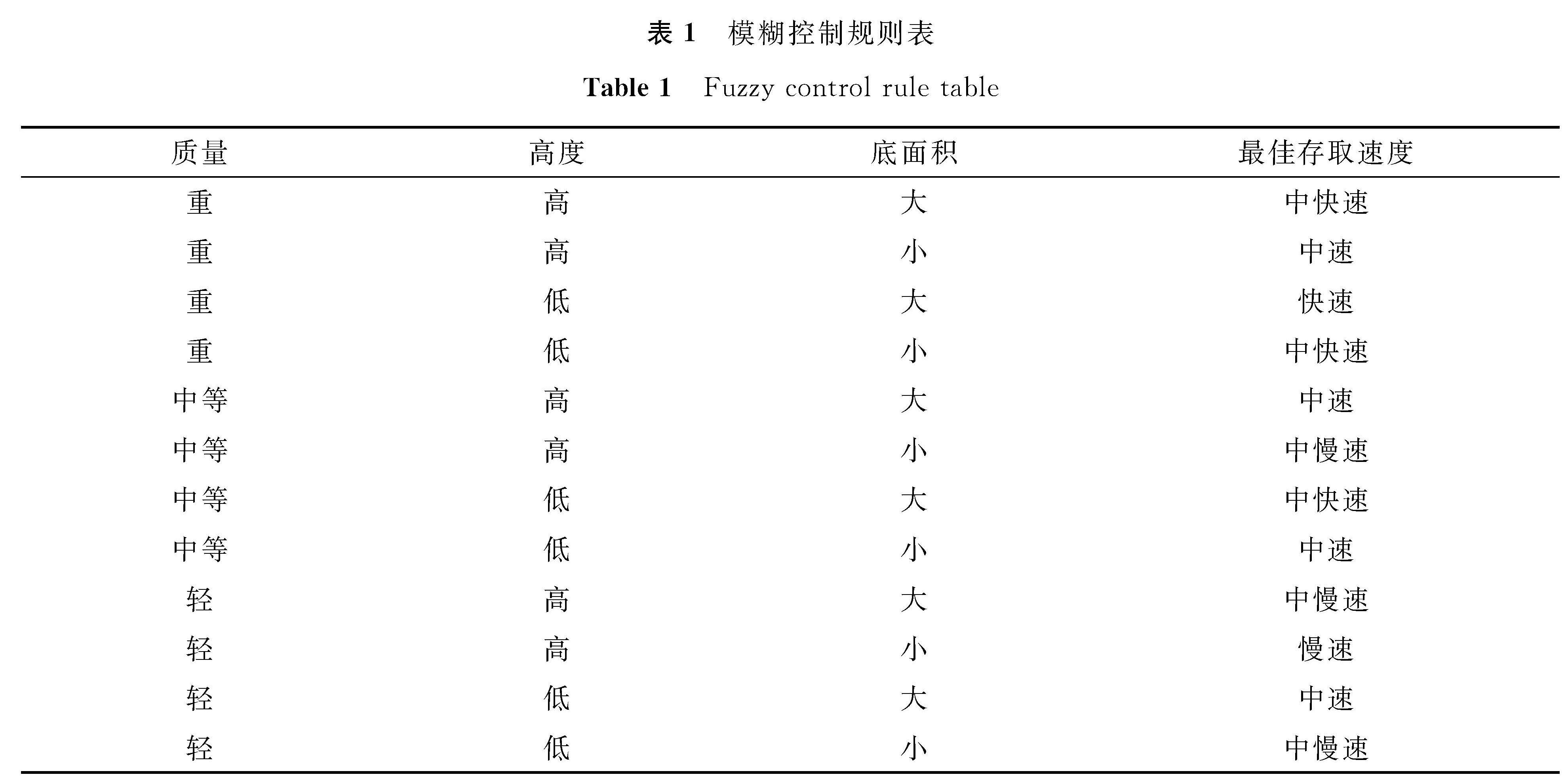
表1 模糊控制规则表
Table 1 Fuzzy control rule table
快递质量、高度、底面积与快递最佳存取速度之间的关系,以及快递质量和高度与快递最佳存取速度之间的关系见图6~9。
通过观察图6~9可知,质量或底面积增加、高度降低可以在一定程度上提高最佳存取速度,其原因是质量或底面积增大、高度降低提高了快递的稳定性。但当电机处于额定转速时,存取速度就会处于最大值并保持不变。另外,图6~9中的关系曲线和关系曲面都较平滑,这说明我们的模糊控制算法设计良好,可以用于最佳存取速度的确定。
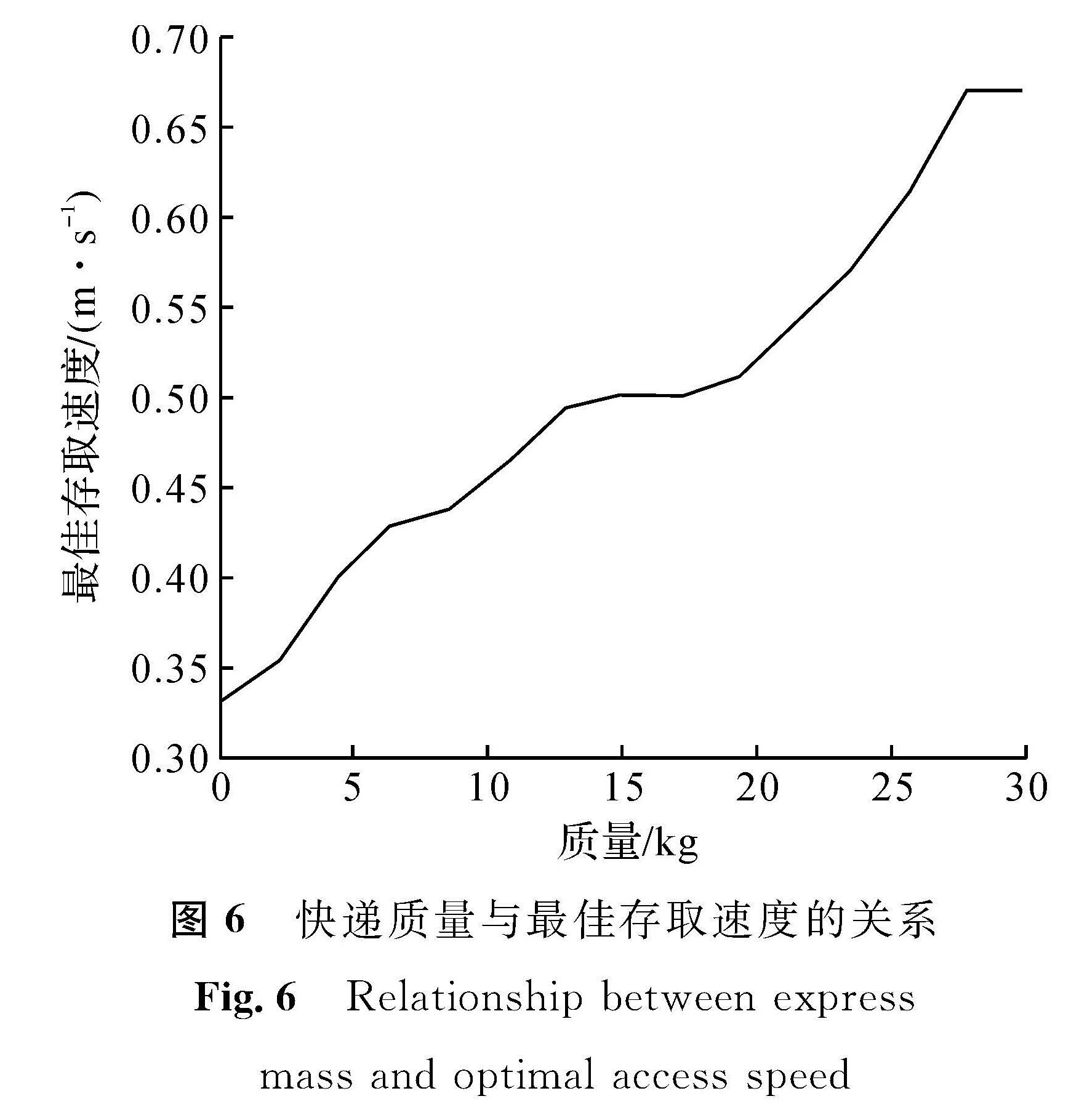
图6 快递质量与最佳存取速度的关系
Fig.6 Relationship between express mass and optimal access speed

图7 快递高度与最佳存取速度的关系
Fig.7 Relationship between express height and optimal access
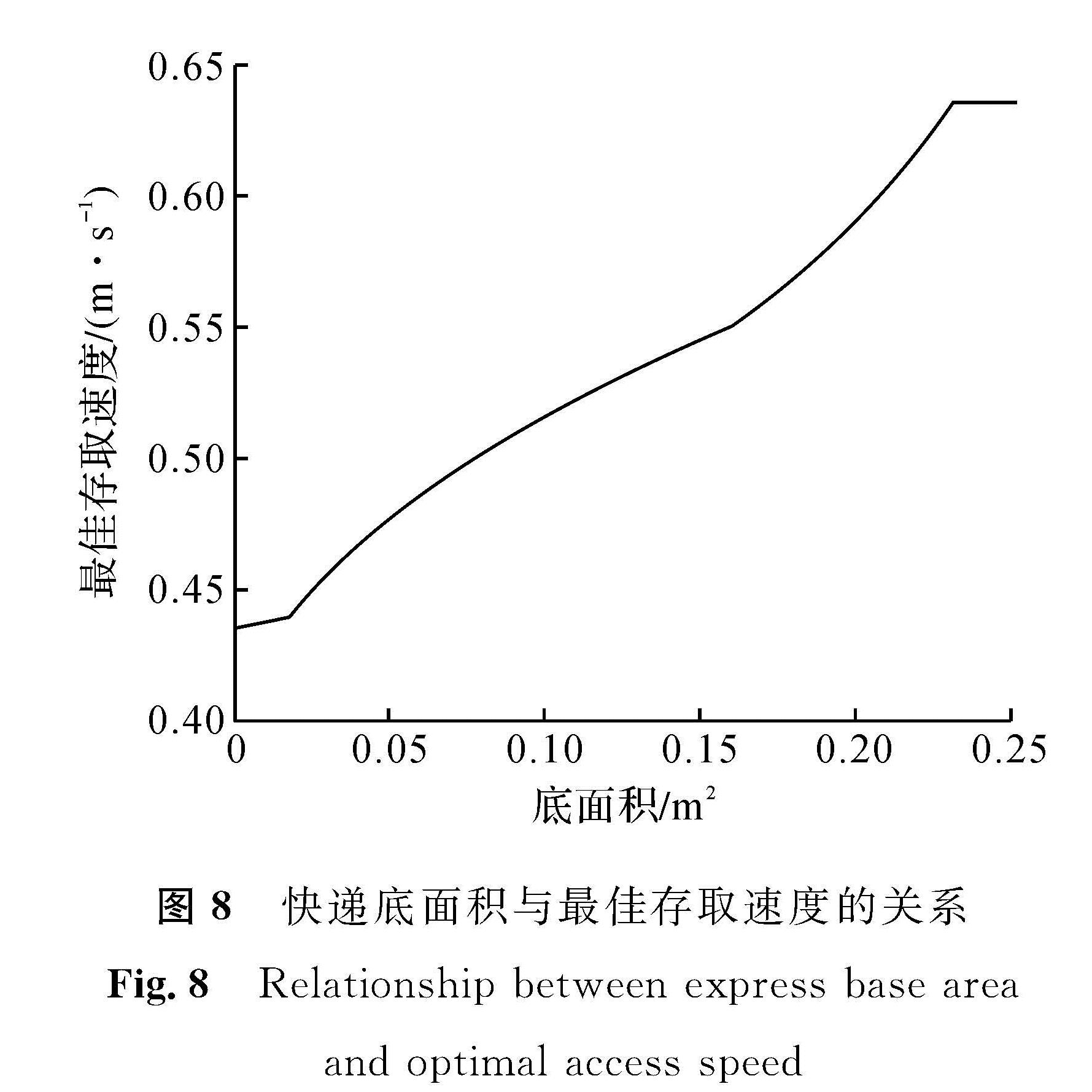
图8 快递底面积与最佳存取速度的关系
Fig.8 Relationship between express base area and optimal access speed
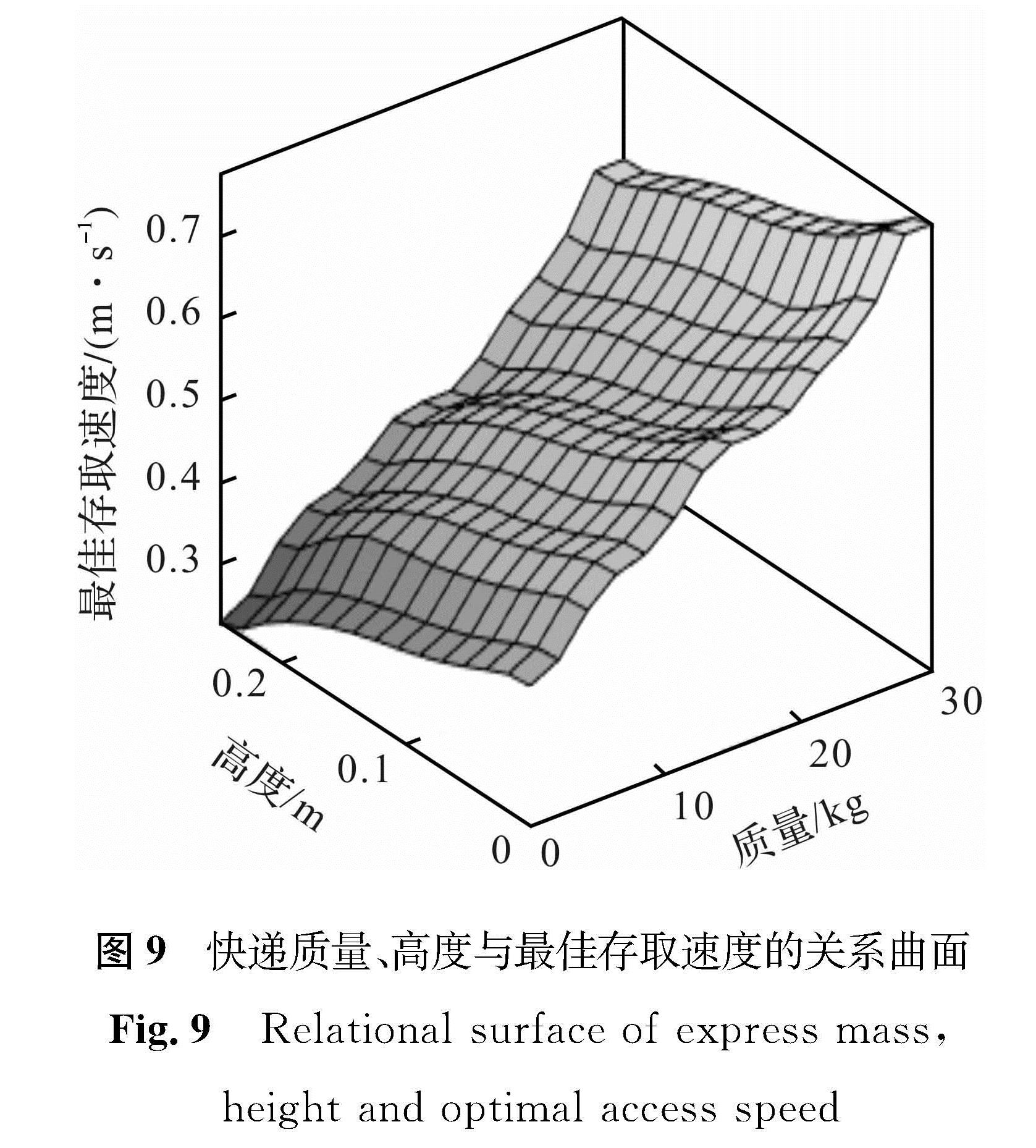
图9 快递质量、高度与最佳存取速度的关系曲面
Fig.9 Relational surface of express mass,height and optimal access speed
3 速度的模糊控制及仿真
速度的控制方式[10-13]主要有闭环控制、多段调速控制和模糊控制。闭环控制缺少位移反馈,会经历一个较低速度的运行阶段,导致存取效率较低; 多段调速控制在启停瞬间会产生较大速度变化,快递存取不稳定,易造成快递的掉落; 模糊控制具有较强的鲁棒性,但若是仅仅采用一般的模糊控制,系统会不太稳定,无法满足要求。基于以上分析,本文在快递存取加速段将积分控制和模糊控制相结合,构成模糊PID(proportion integral differential,比例-积分-微分)控制。其控制系统原理如图 10所示。
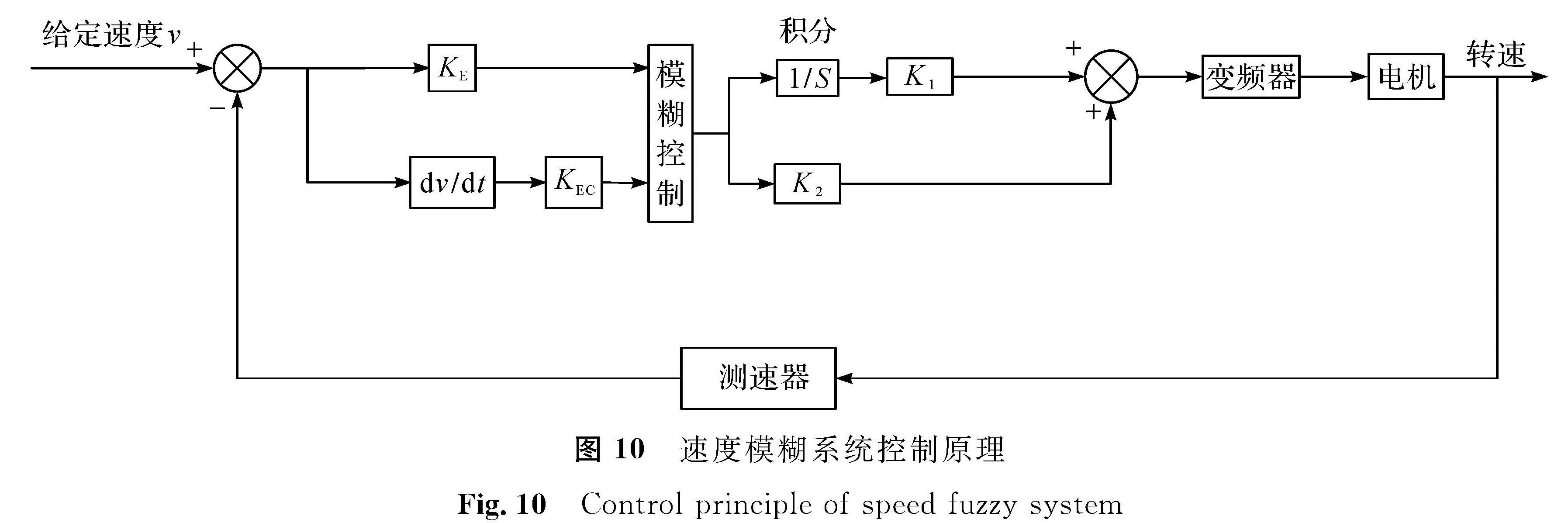
图 10 速度模糊系统控制原理
Fig.10 Control principle of speed fuzzy system
图 10中,角频率的偏差E和偏差变化率EC是模糊控制的输入,而转差频率Ws是模糊控制的输出。其中量化因子KE和KEC、比例因子K1和K2这4个参数的确定需要经过不断调试。
本文主要研究快递存取的加速阶段,也就是在电机升速阶段,并对其采用模糊PID控制。设置模糊PID控制输入变量和输出变量的量化论域都为[-6,6],输入输出变量的模糊词集[14]如下:
输入变量E:{NZ、NS、NM、NB、PB、PM、PS、PZ};
输入变量EC:{NB、NM、NS、Z、PS、PM、PB};
输出变量Ws:{NB、NM、NS、Z、PS、PM、PB}。
其中:PB,负大; PM,负中; PS,负小; PZ,负零; Z,零; NZ,正零; NS,正小; NM,正中; NB,正大。
每个输入输出模糊变量都选取三角形的隶属函数曲线,并建立模糊控制规则。模糊控制规则在建立时须满足一定的准则:当系统的反馈值与参考值存在较大的差值时,控制规则就需要减小两者差值; 而当两者存在较小的差值时,控制规则一方面需要减小差值,同时另一方面还需要使系统在稳定性方面表现良好[15-16]。据此制定表2的速度模糊控制规则。
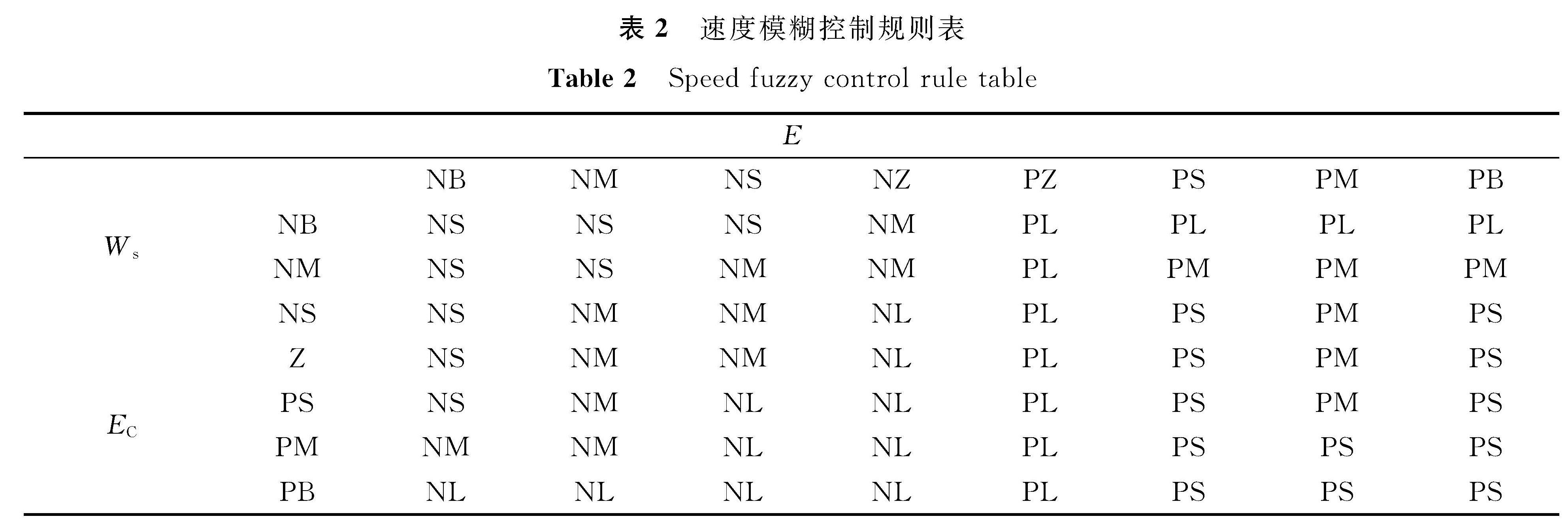
表2 速度模糊控制规则表
Table 2 Speed fuzzy control rule table
速度控制系统仿真模型的设计是在MATLAB里的Simulink工具箱进行的,如图 11所示。仿真研究针对的是快递存取的加速阶段,即快递存取速度由零到匀速时的这一阶段。仿真过程中通过对比的方式来说明模糊PID控制的效果能否达到更优。
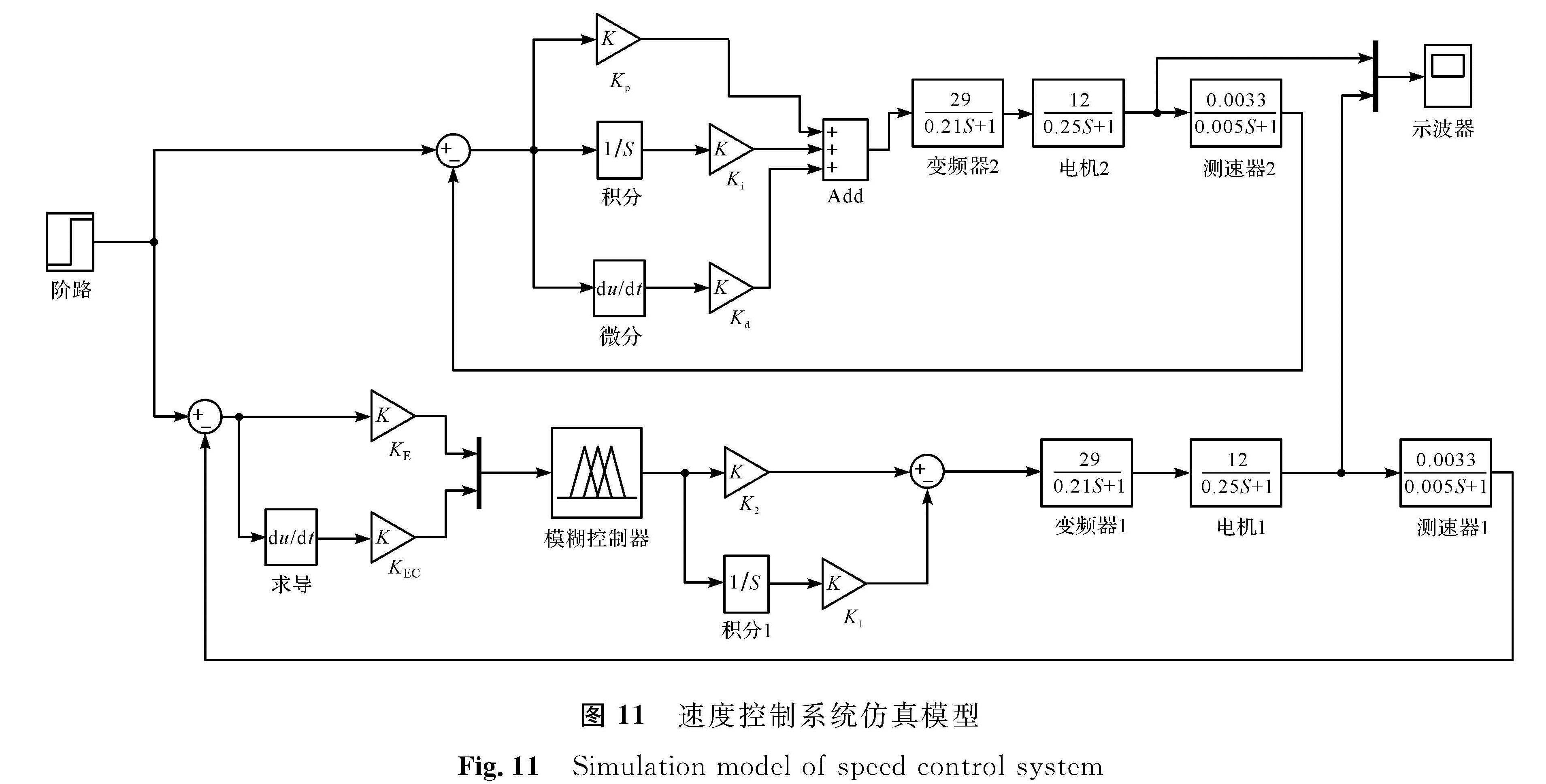
图 11 速度控制系统仿真模型
Fig.11 Simulation model of speed control system
为了方便研究,这里将变频器、交流电机和测速器的传递函数都进行了相应的简化。在图 11中,上半部分是一般PID控制模型,下半部分是模糊PID控制模型。通过仿真获得的曲线如图 12所示。
图 12中,2条曲线代表着不同的控制方式,根据仿真曲线可知:相比于一般的PID控制,采用模糊PID控制的系统超调量降低了,调节时间减少了。其中超调量由13.3%降到3.3%,调节时间由2 s降到1.2 s。可见,我们设计的模糊PID控制方式使加速阶段的控制更稳定和快速。
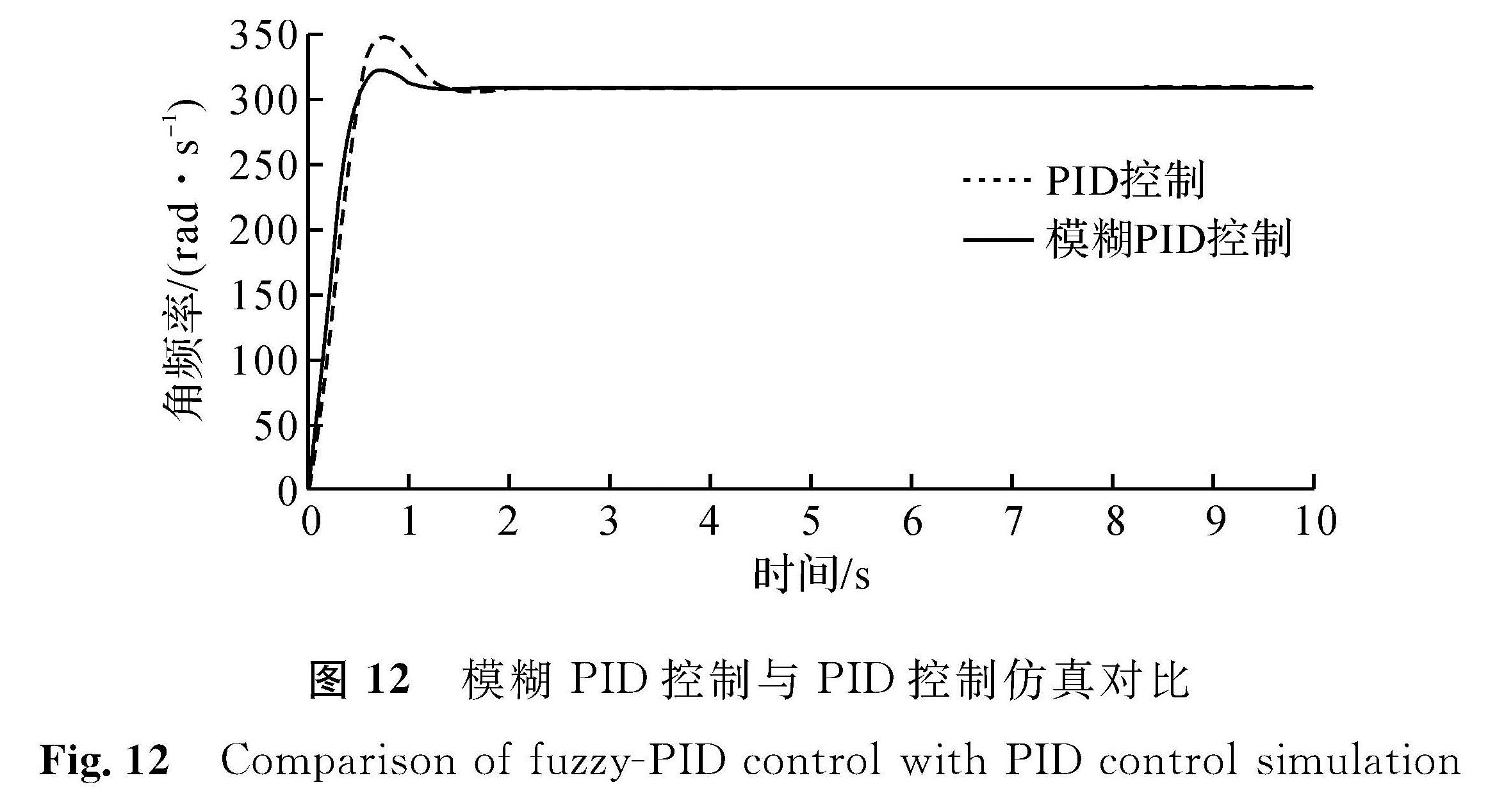
图 12 模糊PID控制与PID控制仿真对比
Fig.12 Comparison of fuzzy-PID control with PID control simulation
4 结 语
本文主要研究了快递的质量、高度和底面积3个因素对快递存取速度的影响,并借助了模糊控制理论进行了速度的控制研究。采用MATLAB/Simulink进行了速度控制系统的建模和仿真,结果表明:我们设计的模糊PID控制方式比一般的PID控制具有更好的控制效果。系统超调量降低,响应时间缩短,从理论上而言,该方式较好地提升了快递的存取速度。后续在条件允许的情况下,还需要进行相应的试验研究以验证理论的实际效果。
- [1] 杨萌柯,周晓光.“互联网+”背景下快递末端协同配送模式的构建[J].北京邮电大学学报(社会科学版),2015,17(6):45.
- [2] 黄景贤.国际快递产业发展现状研究[J].电子商务,2018(7):31.
- [3] 圆通研究院,物流信息共享技术及应用国家工程实验室.中国智能快递柜发展现状与未来方向[J].中国物流与采购,2018(7):68.
- [4] 韩嵩,吴海建.我国快递业发展现状分析[J].中国统计,2016(1):27.
- [5] 阮学云,丁恒,胡自然,等.一种智能立体旋转快递存取装置设计研究[J].机械设计与制造,2018(9):83.
- [6] 冯小飞,郭红玉,蔡康,等.一种自动存取快递机的设计与研究[J].起重运输机械,2013(8):56.
- [7] 丁恒.一种计数识别式寄存取快递库的设计与分析[D].淮南:安徽理工大学,2017.
- [8] 韩彬.基于DSP F2812的无刷直流电机模糊控制系统的设计[D].镇江:江苏大学,2009.
- [9] 王鑫国,陆金桂.堆垛机自适应模糊优化控制方法研究[J].制造业自动化,2010,32(13):86.
- [10] 王雪,蔡安江,应嘉奇.基于模糊PID的堆垛机控制系统研究[J].机械设计与制造,2017(5):17.
- [11] 张铁异,李俚,陈琳,等.堆垛机的半闭环变频调速控制[J].制造业自动化,2011,33(7):42.
- [12] 薛晖.S型速度曲线在有轨巷道堆垛机速度控制中的应用研究[D].兰州:兰州交通大学,2013.
- [13] 李文灿.PLC-变频器在巷道堆垛机提升系统中的应用[J].机械,2009,36(5):57.
- [14] 陈林松.基于模糊PID的快递存取装置存取速度控制的研究[D].杭州:浙江科技学院,2019.
- [15] 刘友才,吴怀宇,陈洋.基于自适应模糊PID控制的四旋翼飞行器的自主跟踪[J].高技术通讯,2017,27(2):168.
- [16] 潘海鹏,史桂丽.一种基于知识关联的自组织模糊控制方法[J].控制工程,2012,19(6):1069.