 图 1 三轴增稳云台结构
Fig.1 Three-axis stabilized cloud platform structure
图 1 三轴增稳云台结构
Fig.1 Three-axis stabilized cloud platform structure
ZHU Yifeng,WANG Zihui,HE Zhiyuan.Research on attitude control method of vehicle three-axis stabilized cloud platform based on LADRC[J].Journal of Zhejiang University of Science and Technology,2019,31(06):450-456.[doi: 10.3969/j.issn.1671-8798.2019.06.005]

车载增稳视觉云台是自动驾驶车辆的重要组成部分,可实现稳定的路况图像识别。以三轴云台永磁伺服电机为研究对象,提出一种基于线性自抗扰算法的姿态稳定控制策略。基于永磁同步电机矢量控制和空间坐标姿态解算方法,建立三轴增稳云台结构模型和永磁同步电机数学模型,并获取云台空间角度信息。在云台电机姿态控制中引入线性自抗扰控制器,实现对车辆震动干扰的在线辨识与自稳调节。仿真试验结果表明,云台系统中加入线性自抗扰控制方法可有效提高系统的响应速度并减少调节时间,较之常规的PI控制具有更强的抗干扰性,因此该方法对车用三轴增稳云台姿态控制具有一定参考价值。
Vehicle stabilization vision platform is an important part of autonomous vehicle, which can realize stable image recognition of road conditions. Targeting three-axis permanent magnet servo motor, an attitude stability control strategy was developed on the basis of linear active disturbance rejection algorithm. Based on the vector control of permanent magnet synchronous motor(PMSM)and the calculation method of spatial coordinate attitude, the three -axis stabilized cloud platform structure model and the mathematical model of PMSM were established, obtaining the spatial angle information of PMSM. The linear active disturbance rejection controller(LADRC)was introduced into the attitude control of cloud platform motor to realize the on-line identification and self-stability adjustment of vehicle vibration interference. The simulation results show that incorporation of LADRC into the cloud platform can effectively improve the response speed and reduce the adjustment time of the system, and has stronger anti-interference than the conventional PI control. Hence,this method can be of certain reference value for the attitude control of the three-axis stabilized cloud platform for vehicles.
摄像头传感器在自动驾驶车辆中被大量运用,存在着传感器随车身在行驶过程中一起发生振动的问题,影响了摄像传感器拍摄图像的质量。为解决此类问题,选择三轴增稳云台作为摄像头与车体的连接装置,通过控制云台的三轴旋转来实现车载摄像头姿态稳定的目的。云台的姿态控制通常针对三轴伺服电机进行基于PI(proportion integral,比例-积分)控制器的位置、速度、电流多闭环控制,由于PI控制器是通过增大系统的开环增益来扩大系统的带宽,从而得到较高的控制精度,但会造成控制系统相位裕量的降低,影响控制系统的稳定性[1],所以传统的PI控制无法较好地满足云台快速响应扰动的控制需求。为了提高云台的抗扰动能力,郭炳坤等[2-3]将自适应卡尔曼滤波算法同模糊PID(proportion integral differential,比例-积分-微分)进行结合,仿真试验结果表明,算法在云台控制上具有响应速度快、精度高的特点,适用于云台位置控制的场合。王日俊等[4]提出了一种基于改进扰动观测器的模糊自适应跟踪控制算法,在原有的扰动观测器结构的反馈回路中引入了补偿控制,用来构建基于速度信号的改进型扰动观测器结构,通过试验证明该控制结构对补偿云台扰动具有较好的效果。然而,上述控制策略均对模型精度要求较高,在无法准确获知系统模型的情况下,其控制效果无法达到预期水平。韩京清[5]提出了一种自抗扰控制(active disturbance rejection control,ADRC)策略,在PID的优点上进行了改进,其核心是依据系统输出信号和输入信号进行积分串联并以此作为标准型,把系统中与标准型有差异的部分视为总扰动,并采用扩张状态观测器(extended state observer,ESO)实时估计系统内部不确定因素和外部扰动,并在反馈控制中进行补偿控制,达到消除扰动的目的,使得系统能够实现较好的控制效果。Gao[6]从ADRC策略出发提出了线性自抗扰控制(linear active disturbance rejection control,LADRC),该方法基于带宽的参数整定,改进了原ADRC参数整定复杂的缺点,特别适用于工程领域应用。
三轴增稳云台系统是一个多变量、强耦合的动态系统,其数学模型无法准确求取,为了有效解决云台系统受外界干扰导致系统不稳定的问题,将LADRC控制器应用于云台系统中。基于扩张状态观测器的LADRC控制器具有不依赖被控对象数学模型的特点,可以快速实现云台的位置跟踪,达到稳定控制云台角度的目的。

图1 三轴增稳云台结构
Fig.1 Three-axis stabilized cloud platform structure
1 三轴增稳云台结构及姿态解算
三轴增稳云台由3个相互垂直的机械臂组成,具有3个可任意旋转的自由度[7]。云台通过姿态传感器获取角度信息和速度信息,再经过姿态解算算法和滤波算法后驱动电机运动来达到云台自稳定的效果。云台3个轴分别为偏航轴、俯仰轴和翻滚轴,其结构如图1所示。
三轴增稳云台的轴与轴之间大都采用永磁同步电机联接,电机作为云台位置的执行部件,可根据云台实时反馈的空间坐标进行补偿轴位移,使得云台达到稳定的状态。控制云台稳定的本质是电机控制,包括单轴电机角度控制和多轴电机角度联动控制。为提高三轴云台的响应速度、控制精度及鲁棒性,电机控制系统采用位置环、速度环、电流环构成的三闭环控制模式,其流程如图2所示。图2中φ、θ、ψ、ω、i分别为俯仰角、偏航角、翻滚角、角速度和电流值。
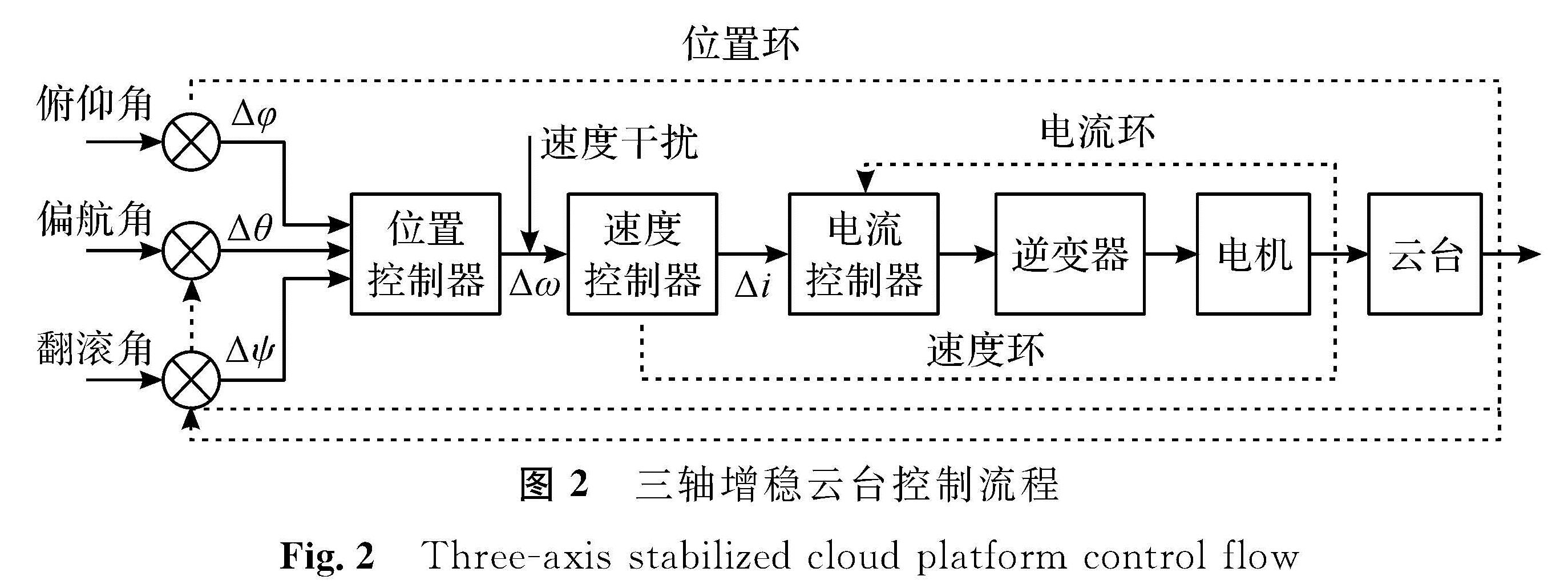
图2 三轴增稳云台控制流程
Fig.2 Three -axis stabilized cloud platform control flow
位置闭环是通过云台上的姿态传感器获取位置信息并与期望角度值进行比较后输入信号给位置控制器,速度闭环和电流闭环通过检测三轴电机的速度和电流大小进行控制,三闭环控制使得整个系统形成完整统一的闭环控制系统。三轴增稳云台的姿态角实质上是指地球坐标系和云台本体坐标系的相对角度,常用的表示方法有欧拉角、方向余弦矩阵和四元数[8-9]。本文采用四元数作为姿态解算的主要算法,通过求解微分方程,用得到的四元数值替代方向余弦矩阵微分方程的解算[10],其表达式如下:
Q=[q0 q1 q2 q3]T。
由地球坐标系向云台坐标系转换的四元数姿态矩阵如下:
Q=[q20+q21-q22-q23 2(q1q2-q0q3)2(q1q3+q0q2)
2(q1q2+q0q3)q20-q21+q22-q23 2(q2q3-q0q1)
2(q1q3-q0q2)2(q2q3+q0q1)q20-q21-q22+q23]=[Q11 Q12 Q13
Q21 Q22 Q23
Q31 Q32 Q33]。(1)
由式(1)可知,四元数构成的姿态矩阵不含三角函数,其计算量显著降低,可方便采用一阶龙格库塔法求解四元数微分方程[11],获得三轴的姿态角与期望角进行比较后即可作为云台系统角度输入量。用四元数表示的偏航角θ、俯仰角φ和翻滚角ψ公式如下:
{θ=arcsin(Q31);
φ=arctan((Q32)/(Q11));
ψ=arctan((Q21)/(Q11))。
2 永磁同步电机数学模型永磁同步电机普遍作为控制三轴增稳云台的执行机构,为了简化对永磁同步电机的分析,现作如下假设:1)忽略磁路饱和、磁滞和涡流的影响,视电机磁路是线性的,可以应用叠加原理对电机回路各电磁参数进行分析; 2)电机的定子绕组三相对称,各绕组轴线在空间上互差120°电角度,电流按照正弦规律变化; 3)转子上没有阻尼绕组,永磁体没有阻尼作用; 4)如果温度及频率发生变动,由此产生的绕组电阻变化可忽略不计[12-13]。
永磁同步电机在dq坐标系的磁链方程、电压方程、电磁转矩方程和力矩平衡方程分别如下:
{φd=Ldid+φf;
φq=Lqiq。(2)
{ud=(dψd)/(dt)-ω ψq+Rsid;
uq=(dψq)/(dt)+ω ψd+Rsiq。(3)
Te=3/2P[ψfiq+(Ld-Lq)idiq]。(4)
Te-Tl=J/P·(dω r)/(dt)。(5)
式(2)~(5)中:Ld、Lq为电机直轴、交轴同步电感; id、iq为dq同步旋转坐标系中直轴与交轴电流; ψ f为转子永磁体磁极的励磁磁链; Rs为电机定子电阻; Te、Tl为电磁转矩和负载转矩; P为电机定子绕组极对数; ωr为转子电角速度。
云台控制系统中的电机速度环和电流环可通过上述方程构建,以保证闭环系统的输入量正确。位置闭环则采用梯形曲线或三角形曲线来实现,使得系统在不超过最大输出能力的前提下,以最快速度到达指定位置点。
3 LADRC控制器LADRC控制器在ADRC的基础上进行了线性简化,以减少待整定参数,采用了线性扩张状态观测器(linear extended state observe,LESO)和线性反馈控制律(linear state error feedback,LSEF)[14],其典型二阶线性自抗扰控制器结构如图3所示,图中:θ为参考输入角度; y、u分别对应云台系统的输入和输出; kP、kD为二阶线性状态误差反馈控制律参数; z=[z1 z2 z3]T是线性扩张状态观测器的状态矩阵; ω(t)为外部扰动; b0为系统参数的估计值。
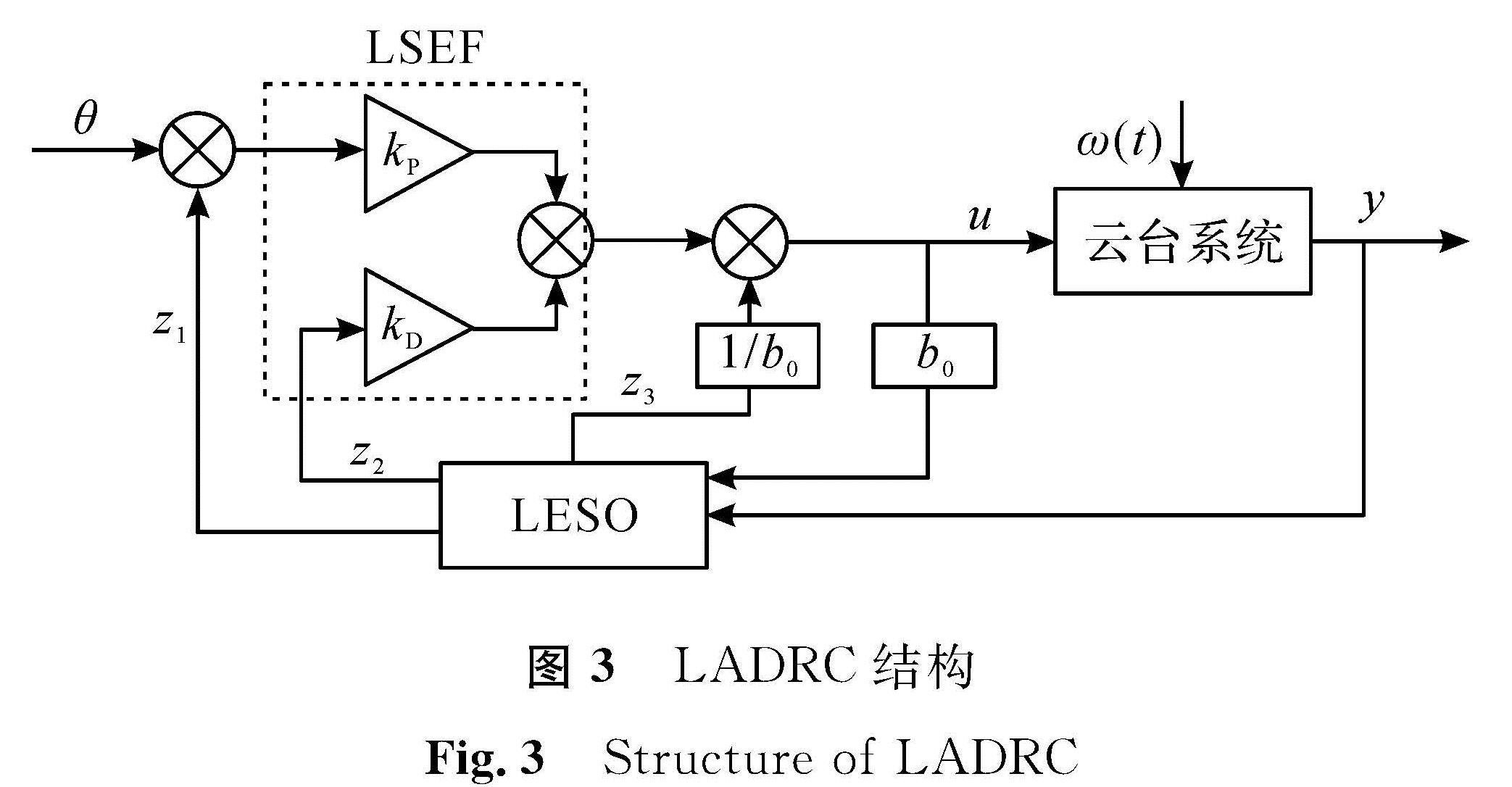
图3 LADRC结构
Fig.3 Structure of LADRC
已知n阶非线性状态误差反馈控制律方程为
u=k1f(e1,α1,δ)+…+knf(en,αn,δ)-(zn+1)/(b0)。(6)
式(6)中:ei=vi-zi(i=1,2,…,n); αi、δ、ki是待整定参数; f(e,α,δ)是典型非线性函数,δ>0,当|e|>δ时,f(e,α,δ)=|e|α·sgn(e),当|e|≤δ时,f(e,α,δ)=e/(δ1-α)。
为实现线性自抗扰控制,需要对该方程进行线性化处理。令f(e1,α1,δ)=e1,f(e2,α2,δ)=e2,…,f(en,αn,δ)=en,则n阶的线性状态误差反馈控制律表达式为
u=k1e1+…knen-(zn+1)/(b0)。(7)
设ωc是控制器带宽,则式(7)的特征多项式为
λc=sn+1+knsn+…+k1=(s+ωc)n。
则二阶线性控制律参数kP=ω2c,kD=2ωc,其中ωc的大小影响系统的响应速度和系统的稳定性[15]。
三轴增稳云台的控制角度分为俯仰角、偏航角和翻滚角。以任意一个角为控制对象,假设总扰动为φ(t)=δ(t)+ω(t),其中δ(t)为内部扰动,则该角的控制模型可用如下形式的LESO估计:
Z=[0 1 0
0 0 1
0 0 0]z+u[0
b0
0]+(y-[1 0 0]z)[β1
β2
β3]。(8)
式(8)中:Z为LESO的矩阵方程; β=[β1 β2 β3]T为线性状态观测器的增益。
根据文献[16]的研究成果可知,所有待整定参数与观测器带宽ω0的数学关系如下:
λ0=sn+1+β1sn+…+βns1+βn+1s0=(s+ω0)n+1。
将LESO的极点配置在观测器带宽处,可得二阶系统参数β1=3ω0,β2=3ω20,β3=ω30。ω0越大,LESO的观测精度就越高,但同时也会引起测量噪声的放大,需要合理取值。整个线性状态观测器的表达式可描述如下:
{e=z1-y;
Z1=z2-3ω0e;
Z2=z3-3ω20e+b0u;
Z3=-ω30e;
u0=ω2c(θ-z1)-2ωcz2;
u=(u0-z3)/(b0)。
4 仿真及结果分析永磁同步电机线性自抗扰控制系统如图4所示。控制系统由位置控制器、速度控制器、电流控制器、坐标变换、空间矢量脉宽调制(space vector pulse width modulation,SVPWM)、逆变器和电机本体(含绝对式位置编码器)组成。其中位置环控制器采用LADRC控制器,仿真研究以位置环为主,不考虑速度环和电流环的控制性能,速度环和电流环仍采用PI控制器。

图4 PMSM控制系统
Fig.4 Control system of PMSM

表1 LADRC参数设定
Table 1 LADRC parameter setting
LADRC控制器参数的不同会涉及系统的上升时间、调节时间等性能指标。因此需要测试不同参数值对系统性能的影响,参数值设定见表1。
为验证不同参数对位置角度响应曲线的影响,分别对预设的3组不同的控制器参数进行位置角度响应曲线仿真试验。以俯仰角为目标姿态角,设定初始俯仰通道角度为0°,预设目标位置为8°,从图5可以看出组合1的参数存在超调的现象,超调量为10%,响应曲线在0.7 s达到稳定,组合2参数下的角度曲线响应速度快且调节时间短,组合3参数下的角度曲线上升时间较长。因此设定控制器最佳参数为b0=0.015,ω0=30,ωc=15。
为验证LADRC控制器的性能,在位置控制回路中将其与PI控制器进行对比。PI比例系数和积分系数分别设置为kP=30,kI=100,LADRC选择组合2的控制参数,同样以俯仰角为试验目标姿态角,设定初始俯仰通道角度为0°,期望角度设置为8°,仿真结果如图6所示。
图6是在云台不受外界干扰情况下的LADRC控制和PI控制的电机角度响应曲线,从图中可以看出采用LADRC控制器的系统位置角跟踪基本上满足设计要求,几乎没有超调,且其上升时间要明显比PI控制短,说明LADRC控制器的响应速度要优于PI控制。LADRC控制器在0.5 s达到目标值,响应快速,角度稳态误差小; 反观PI控制器则在1 s达到期望角度,控制性能较差。
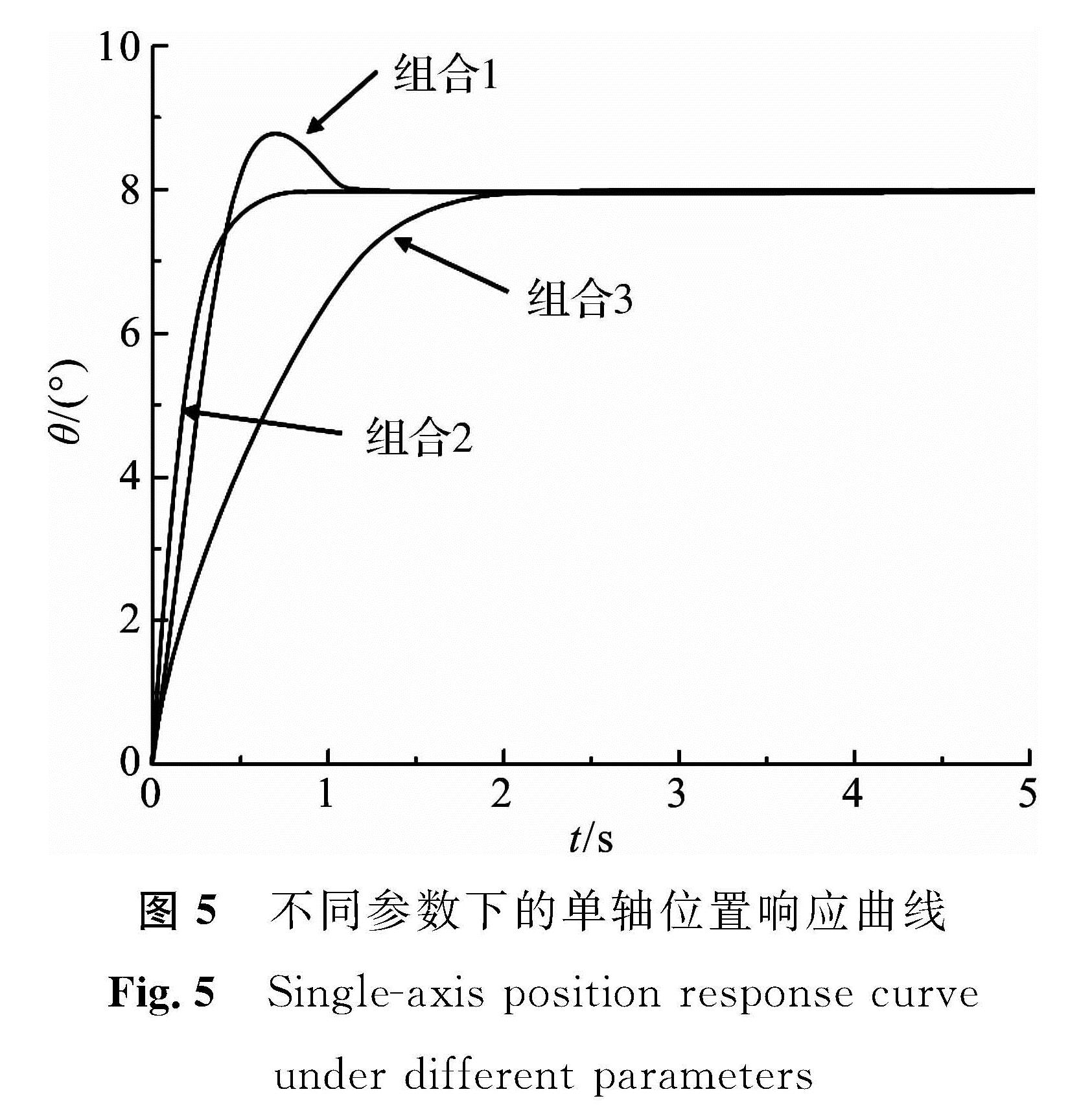
图5 不同参数下的单轴位置响应曲线
Fig.5 Single-axis position response curve under different parameters
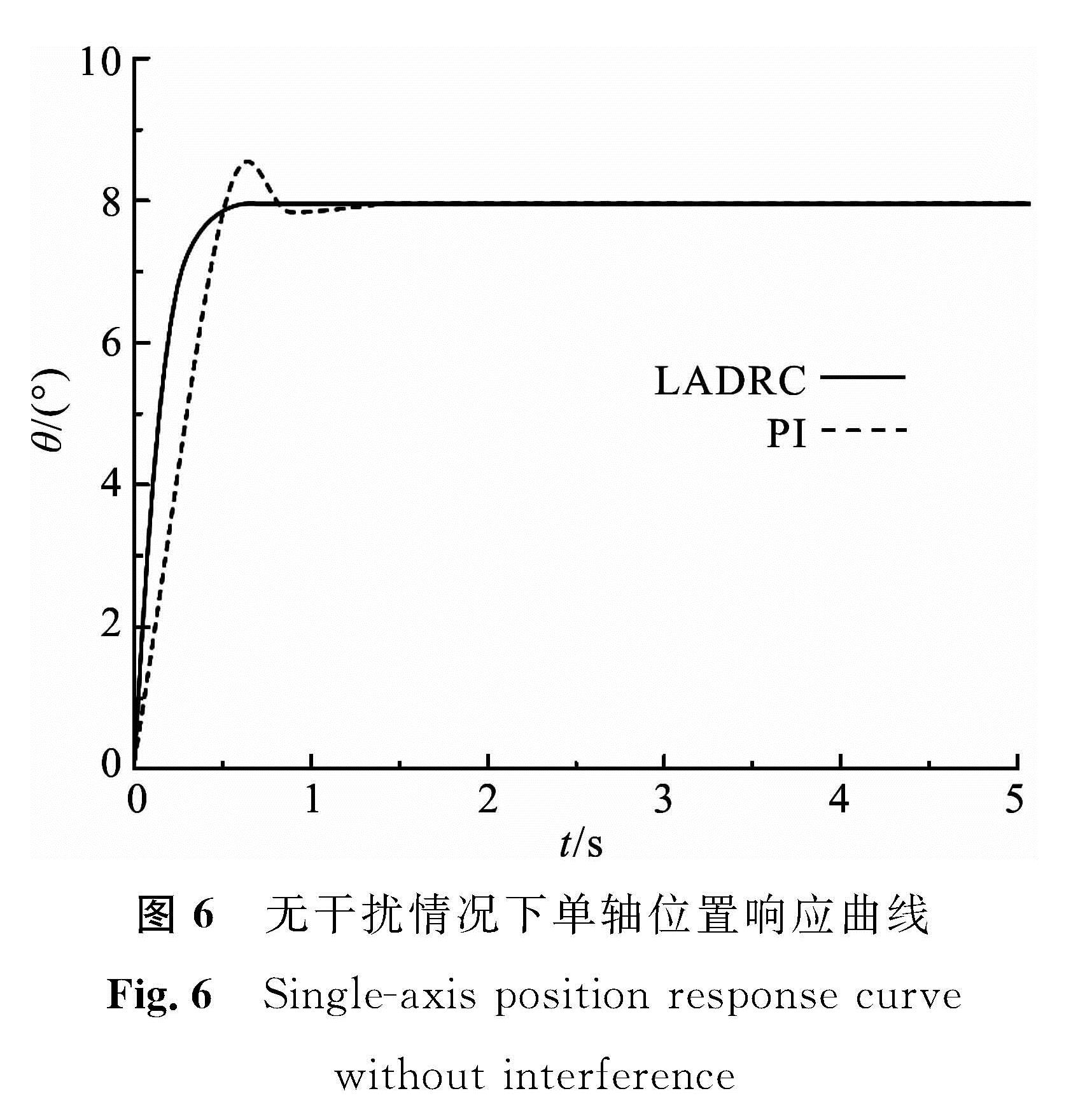
图6 无干扰情况下单轴位置响应曲线
Fig.6 Single-axis position response curve without interference

图7 阶跃干扰下的单轴位置响应曲线
Fig.7 Single-axis position response curve under step interference
图7是模拟云台受到阶跃类型干扰的情况下,进行位置角的响应仿真测试。设置一个时长为1 s,幅值为1°的阶跃信号,从图7可以看出在阶跃干扰的影响下,LADRC控制在0.5 s达到稳态且无振荡现象发生,具有很好的抗干扰性能。而PI控制在受到干扰时,其过渡过程时间要略长于LADRC控制,在0.8 s达到目标位置且存在振荡现象,控制性能较差。经比较LADRC控制性能要优于PI控制。
采用LADRC控制器对云台三轴进行位置响应的性能测试,其仿真试验结果如图8所示。为形成与PI控制效果的对比,图9给出了采用PI控制进行三轴位置响应测试,设定目标位置角分别为(16°、12°、8°)。由图8可知,采用LADRC控制云台可使系统的调节时间ts在1.2 s左右且无振荡现象发生,符合控制要求; 而图9表明,虽然PI控制下的系统过渡过程时间与LADRC控制下的过渡过程时间相近,但PI控制下的三轴位置响应存在振荡现象,控制效果不符合需求。对比上述结果,可以发现,LADRC控制性能要优于PI控制,LADRC控制技术具有更强的抗干扰性能,适用于增稳云台电机控制系统。
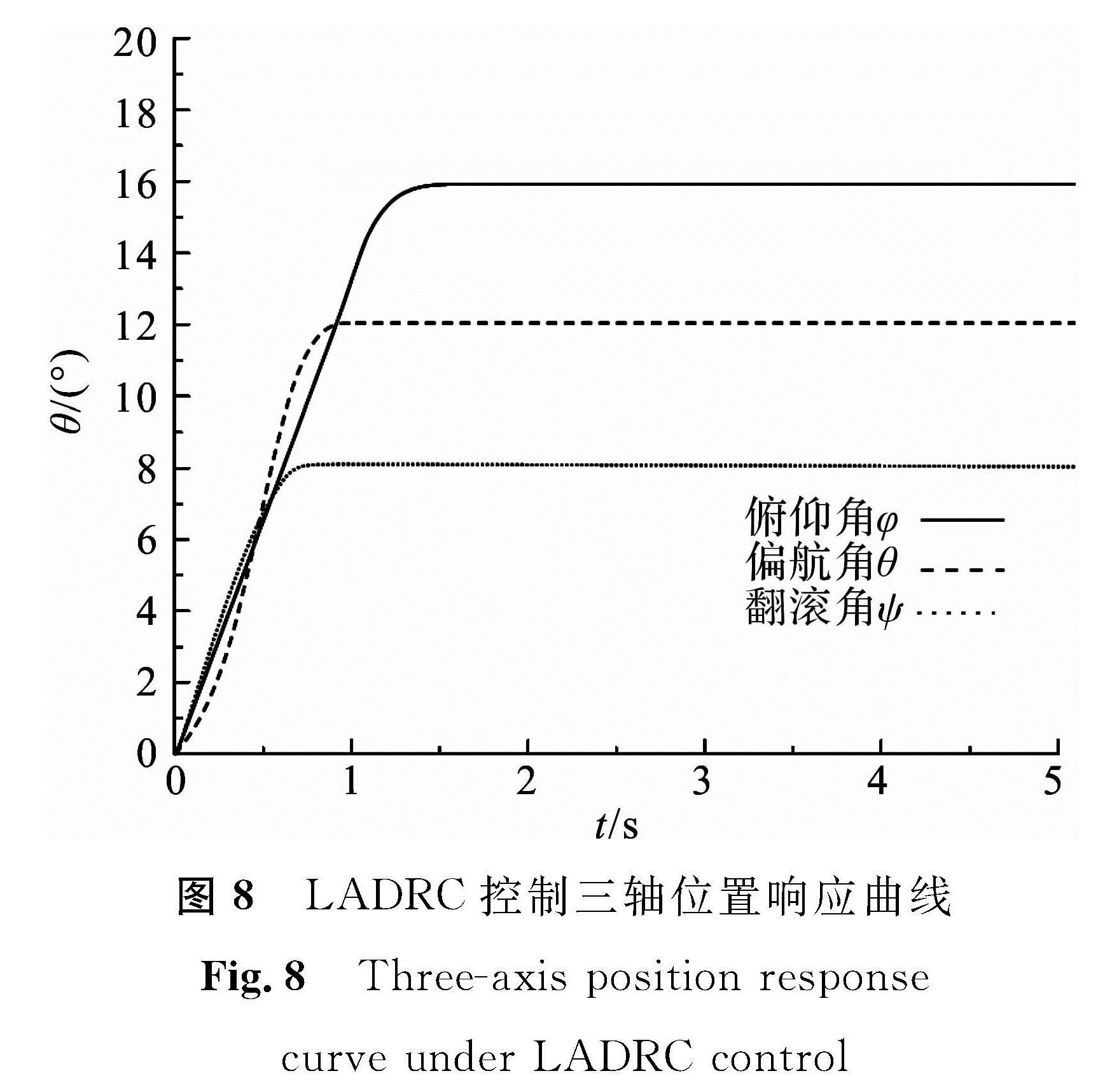
图8 LADRC控制三轴位置响应曲线
Fig.8 Three-axis position response curve under LADRC control
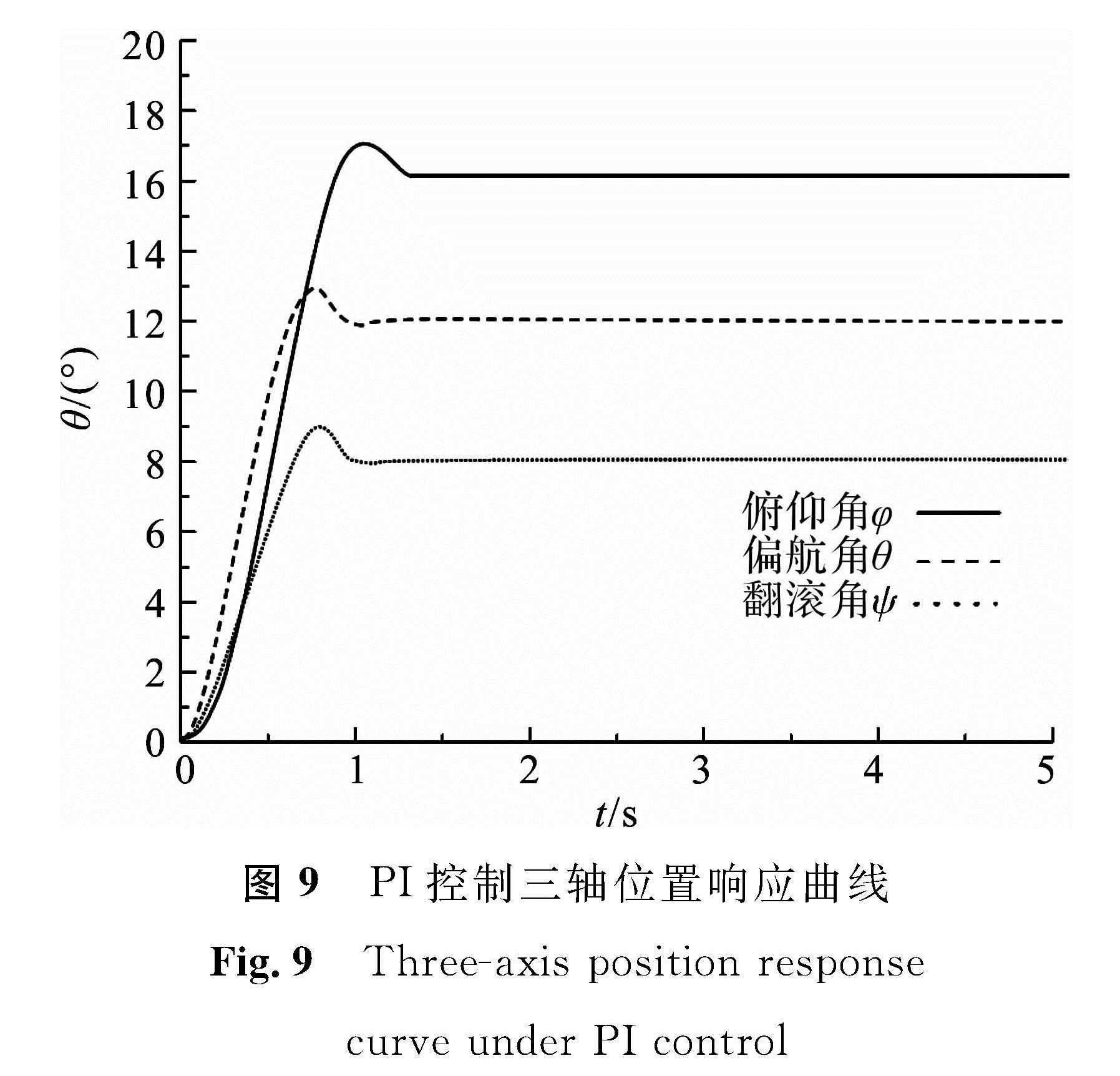
图9 PI控制三轴位置响应曲线
Fig.9 Three-axis position response curve under PI control
5 结 语
在三轴增稳云台模型中应用线性自抗扰控制策略,建立三轴增稳云台数学模型,在明确了控制对象的数学模型后实施云台空间位置角度姿态解算,选择四元数算法作为主要姿态解算算法,其计算结果作为LADRC控制器的角度输入。通过仿真试验平台验证了LADRC控制器具有较强的自恢复能力和抗干扰能力,能够提升云台系统的响应速度和跟踪性能,尤其适用于环境复杂、易受外界干扰的情形。通过仿真试验结果可以看出,采用LADRC控制技术能够实现位置角的理想跟踪,有效地增强了整个系统的抗干扰能力,为提升云台系统的抗扰动性能提供了一种较优的解决方案。
- [1] 方宇超,李梦雪,车英,等.车载光电侦察平台视轴稳定技术研究[J].光学精密工程,2018,26(2):410.
- [2] 郭炳坤,陈水利,吴云东,等.无人机三轴稳定云台的模糊PID控制[J].集美大学学报(自然科学版),2013,18(4):308.
- [3] 袁亚登,孟辉磊,冯乾隆,等.基于模糊PID的电动汽车用永磁同步电机矢量控制仿真研究[J].汽车实用技术,2018(8):6.
- [4] 王日俊,白越,续志军,等.基于扰动观测器的多旋翼无人机机载云台模糊自适应跟踪控制[J].浙江大学学报,2015,49(10):2005.
- [5] 韩京清.自抗扰控制及其应用[J].控制与决策,1998,13(1):19.
- [6] GAO Z Q. Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the American Control Conference. Denver: IEEE,2003:4989.
- [7] 牟强.三轴云台设计及运动目标检测跟踪算法研究[D].成都:西南石油大学,2018.
- [8] 王成波,戈振扬,贺勇,等.基于STM32F4的机载三轴云台控制器设计[J].中国农机化学报,2016,37(8):171.
- [9] 郭阳志.基于ARM的增稳云台姿态控制系统研究[D].武汉:湖北工业大学,2015.
- [10] 章志诚.基于ADRC的四旋翼飞行器自主避障控制系统研究[D].杭州:浙江大学,2017.
- [11] WANG S, SUN X M. ADRC and feedforward hybrid control system of PMSM[J]. Mathematical Problems in Engineering,2013,1120(12):1.
- [12] 刘小斌.永磁同步电机无传感器转子磁极位置检测及其控制技术[M].镇江:江苏大学出版社,2017:28.
- [13] 胡育文,高瑾,杨建飞,等.永磁同步电动机直接转矩控制系统[M].北京:机械工业出版社,2015:10.
- [14] 罗国库,董全林,孙美林,等.自抗扰技术在激光导引头视轴稳定中的应用[J].航空兵器,2019,26(2):34.
- [15] 董家臣,高钦和.永磁直线同步电机电流环新型线性自抗扰控制[J].电机与控制应用,2019,46(1):8.
- [16] LIU C Q, LUO G Z, CHEN Z, etc. A linear ADRC-based robust high-dynamic double-loop servo system for aircraft electro-mechanical actuators[J]. Chinese Journal of Aeronautics,2019,32(9):2174.