 图 1 经典的Bang-Bang控制算法实现过程
Fig.1 Realization process of classic Bang-Bang control algorithm
图 1 经典的Bang-Bang控制算法实现过程
Fig.1 Realization process of classic Bang-Bang control algorithm
XIAO Zhirong,MAO Chao.Research on semi-active control of cables based on improved Bang-Bang control algorithm[J].Journal of Zhejiang University of Science and Technology,2020,32(04):277-282.[doi: 10.3969/j.issn.1671-8798.2020.04.006]

为了提高磁流变(magnetorheological,MR)阻尼器对斜拉桥拉索振动的控制效果,避免在经典的Bang-Bang控制算法下拉索振动幅度很小而MR阻尼器出力却很大的不合理情况,提出基于位移限定的改进的Bang-Bang控制算法(以下简称新算法)。在Simulink中建立相关模型进行数值模拟分析,将基于新算法的半主动控制的控制效果与主动控制、被动控制及基于经典的Bang-Bang控制算法的半主动控制的控制效果进行比较。结果 显示,基于新算法的半主动控制对拉索振动控制效果要好于被动控制及基于经典的Bang-Bang控制算法的半主动控制,其控制效率相对于被动控制和经典的Bang-Bang控制算法分别提高30%和10%以上。这表明新算法对拉索的振动控制效果有一定的改善,因而对实际工程有一定的参考价值。
In order to improve the control effect of the magnetorheological(MR)damper on the vibration of the stay cable and avoid the unreasonable situation in the classic Bang-Bang control algorithm that the cable vibration amplitude is small while the MR damper has a large output, an improved Bang-Bang control algorithm(hereinafter referred to as the new algorithm)was proposed on the basis of displacement limitation. A relevant model was established in Simulink for numerical simulation analysis, comparing the control effect of semi-active control based on the new algorithm with the active control, passive control and semi-active control effect based on the classic Bang-Bang control algorithm. The results show that the semi-active control based on the new algorithm has better effect on cable vibration control than the passive control and the semi-active control based on the classic Bang-Bang control algorithm, the control efficiency is improved by 30% and 10% respectively. It is concluded that the new algorithm has a certain improvement on the vibration control effect of the cable and has a certain reference significance to the actual project.
斜拉桥依靠它自身优良的结构特点、较低的建造成本及美观的形状,被广泛应用于桥梁建造。拉索作为斜拉桥的主要承重构件之一,很容易在外界荷载下产生巨大的振动[1-2],会造成斜拉桥的损坏和严重的突发事故,从而带来重大的经济损失[3]。因此人们越来越重视和关心斜拉桥拉索振动控制方法的研究。目前常用的斜拉桥拉索振动控制措施主要为被动控制、主动控制及半主动控制。被动控制具体可以分为空气动力学措施、辅助索措施和机械阻尼措施3种措施。主动控制方法主要包括极点配置法、经典二次型线性最优控制算法(linear quadratic regulator,LQR)、PID控制(proportion-integral-differential control,比例-积分-微分控制)等。半主动控制则主要有变阻尼和变刚度两种形式。其中变阻尼中的磁流变(magnetorheological,MR)阻尼器凭借其响应迅速、需要输入的能量低和输出阻尼力范围大等优点成为了研究的热门,邬喆华等[4]通过对杭州钱江三桥和湖南洞庭湖大桥进行的大量现场试验研究,得出MR阻尼器的控制效果要好于粘弹性油阻尼器。杨玉冰等[5]研究了自供电形式的MR阻尼器,为斜拉桥拉索振动控制提供了一种新的方法和思路。汪志昊等[6]在前人研究的基础上提出了一种电磁能量回收的自供电MR阻尼器复合减振系统,提升了MR阻尼器对拉索的控制效果。方子奋[7]以嘉绍大桥为例研究MR阻尼器基于不同控制算法的半主动控制下对斜拉桥的振动控制效果,结果证实基于独立模态的半主动控制相对于经典LQR半主动控制能够在更低控制代价的前提下取得更优的控制效果。
经典的Bang-Bang控制算法[8]是一种目前被广泛用于结构振动控制的半主动控制算法。这种算法中电压的切换时间取决于位移及速度的正负关系,对拥有多个固有频率的结构难以达到良好的控制效果[9],因此研究者对经典的Bang-Bang控制算法进行了改良。韦凯等[10]提出改进的Bang-Bang控制算法解决钢弹簧浮置板轨道基频振动放大的问题,张耀辉等[11]提出引入位置阈值的改进型Bang-Bang控制算法以提高车辆乘坐舒适性。为了提高MR阻尼器对拉索的控制效果,禹见达等[12]对经典的Bang-Bang控制算法中的电压切换时间进行了改进,其控制效果要好于被动控制。王修勇等[13]提出一种多级的Bang-Bang控制算法,在一定程度上降低了拉索的不稳定性。为了进一步减少阻尼力对拉索带来的影响,也为了解决拉索的振动幅度很小时但MR阻尼器出力却很大的问题,基于上述研究,本文提出了一种基于位移限定的改进的Bang-Bang控制算法(以下简称新算法),利用Simulink软件建立模型进行数值模拟分析,并与主动控制、被动控制及基于经典的Bang-Bang控制算法的半主动控制进行比较,来验证基于新算法的半主动控制的控制效果相比较于上述几种控制方法是否更有效。
1 斜拉桥拉索-磁流变阻尼器系统的控制算法1.1 被动控制与主动控制本文被动控制选用MR阻尼器的Passive-on被动控制,即输入一个恒定电压值来模拟被动控制,然后建立相应的Simulink仿真模型。主动控制则采用LQR主动控制算法,建立相对应的LQR主动控制的Simulink仿真模型。
1.2 半主动控制经典的Bang-Bang控制算法通过比较MR阻尼器中活塞运动和速度的方向来确定所需要施加电压的大小。当MR阻尼器中的活塞运动方向和它的速度方向相反时,电压取最小值; 当它的位移方向和速度方向相同时则电压为最大值[8]。MR阻尼器所施加的电压
V(t)={Vmax, xx·≥0;
Vmin, xx·<0。(1)
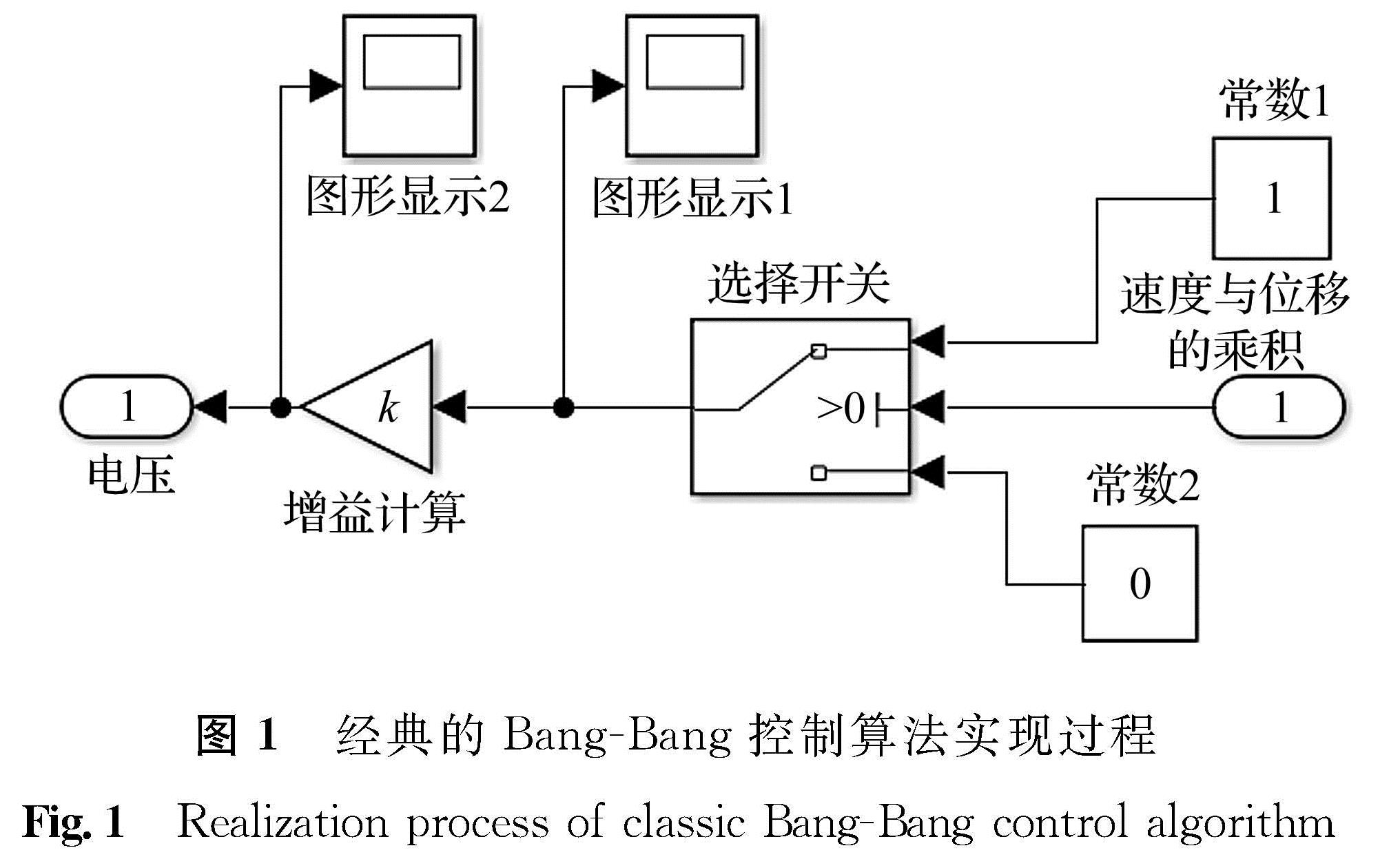
图1 经典的Bang-Bang控制算法实现过程
Fig.1 Realization process of classic Bang-Bang control algorithm
式(1)中:Vmin、Vmax分别为施加的最小电压和最大电压,V; x为活塞运动位移,m; x·为活塞运动速度,m/s。经典的Bang-Bang控制算法具体实现过程如图1所示,其中k为增益计算系数。
我们在经典的Bang-Bang控制算法的基础上增加了一个位移拉索结构的限值[X],m,可以根据实际要求来确定,本研究中取无控制状态时平均振幅的1/3。将原来的二级控制变成三级控制,新算法中MR阻尼器施加的电压
V(t)={Vmax, xx·≥0且|x|≥[X];
Vmin, xx·<0;
1/2Vmax, xx·≥0且|x|<[X]。(2)
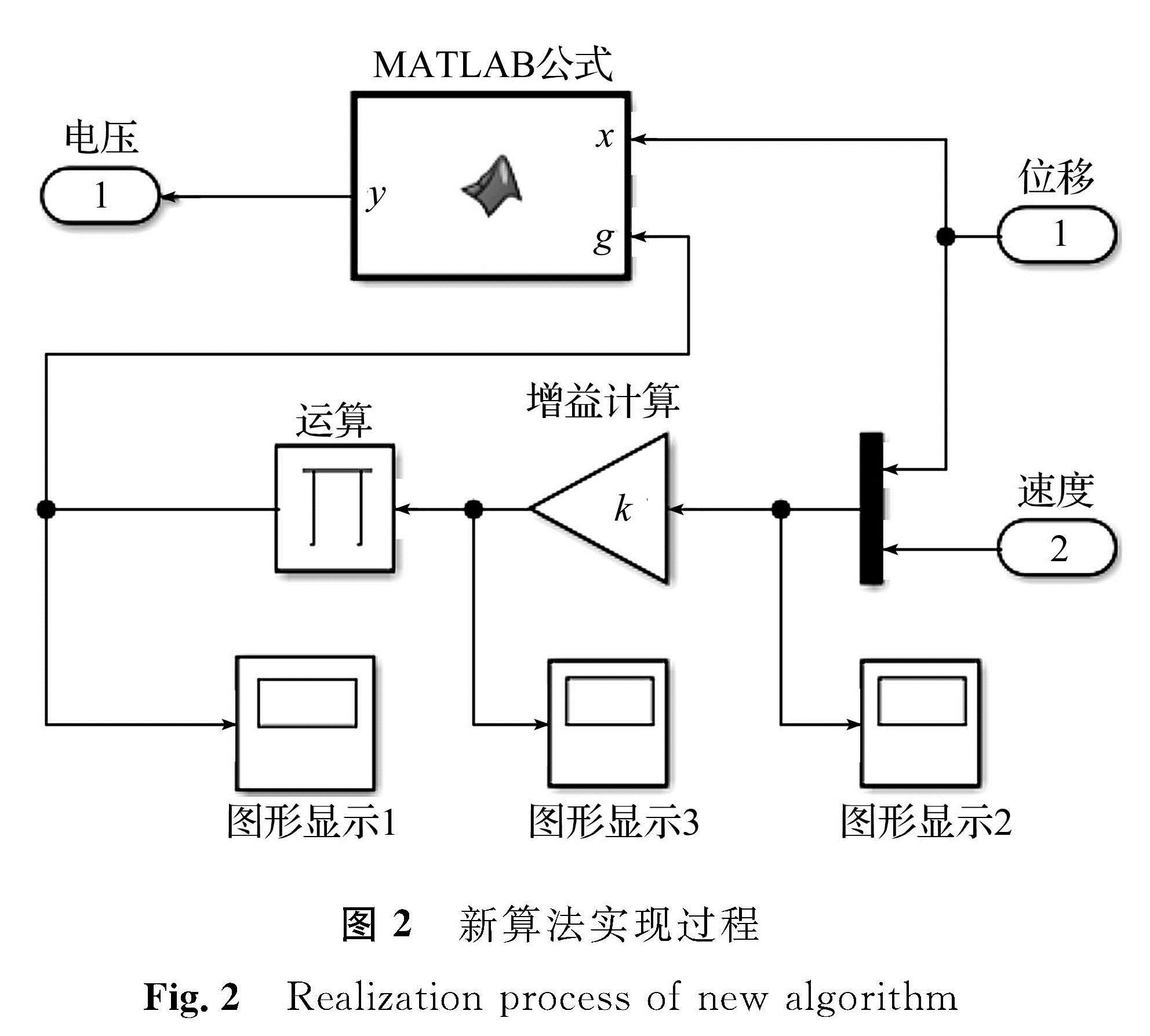
图2 新算法实现过程
Fig.2 Realization process of new algorithm
由式(2)可知:当拉索振动的位移和速度方向相同且位移超过限值时,对阻尼器输入最大电压; 当拉索的位移和速度方向相同但位移未超过限值时,对阻尼器施加最大电压的一半; 而当拉索的位移和速度方向相反时,对磁流变阻尼器输入最小电压。这样的设定可以使MR阻尼器只施加减小拉索振动的力,而不会施加使拉索振动加剧的力,可以避免在结构位移较小的情况下MR阻尼器却提供较大的阻尼力的问题。采用经典的Bang-Bang控制算法时,随着时间的推移,阻尼器输出的阻尼力将引起拉索不稳定,拉索位移可能会偏移平衡位置,新算法变为三级控制后能够降低阻尼器提供的力对拉索造成的不稳定程度。新算法具体实现过程如图2所示。
2 算例分析选取苏通大桥上的一根拉索进行主动控制、被动控制和半主动控制的仿真分析[14],拉索的长度为545.54 m,弹性模量为1.95×1 011 N/m2,横截面积为0.071 6 m2,线密度为91.3 kg/m,拉索与地面的倾斜角为22°,拉索中存在的索力为12 764 kN。
本文根据结构拉索中点位移均方根RMS(root mean square)的大小来反映各种控制方法对拉索的振动控制效果,具体如下:

式(3)中:t为振动响应的总时间,s; X(x,t)为拉索的位移响应。与未安装阻尼器的拉索振动情况进行比较,拉索安装阻尼器条件下振动控制的效率
η=(XRMS-YRMS)/(XRMS)×100%。(4)
式(4)中:YRMS为安装阻尼器条件下拉索的位移RMS值,m; XRMS为未安装阻尼器条件下拉索的位移RMS值,m。
2.1 集中简谐荷载作用施加在拉索上的外荷载为简谐荷载:
F=F0sin(2πφ t)。(5)
式(5)中:F0为简谐荷载作用下的激励幅值,N; φ为激励频率,Hz; t为激励时间,s。取F0=500 N,φ取拉索的第一振动频率为0.5 Hz,作用的时间t=60 s。
图3给出了在简谐荷载作用下,无控制、主动控制、被动控制和基于新算法的半主动控制4种情况下拉索中点的位移时程,以及分别基于新算法与经典的Bang-Bang控制算法的半主动控制的控制效果对比。
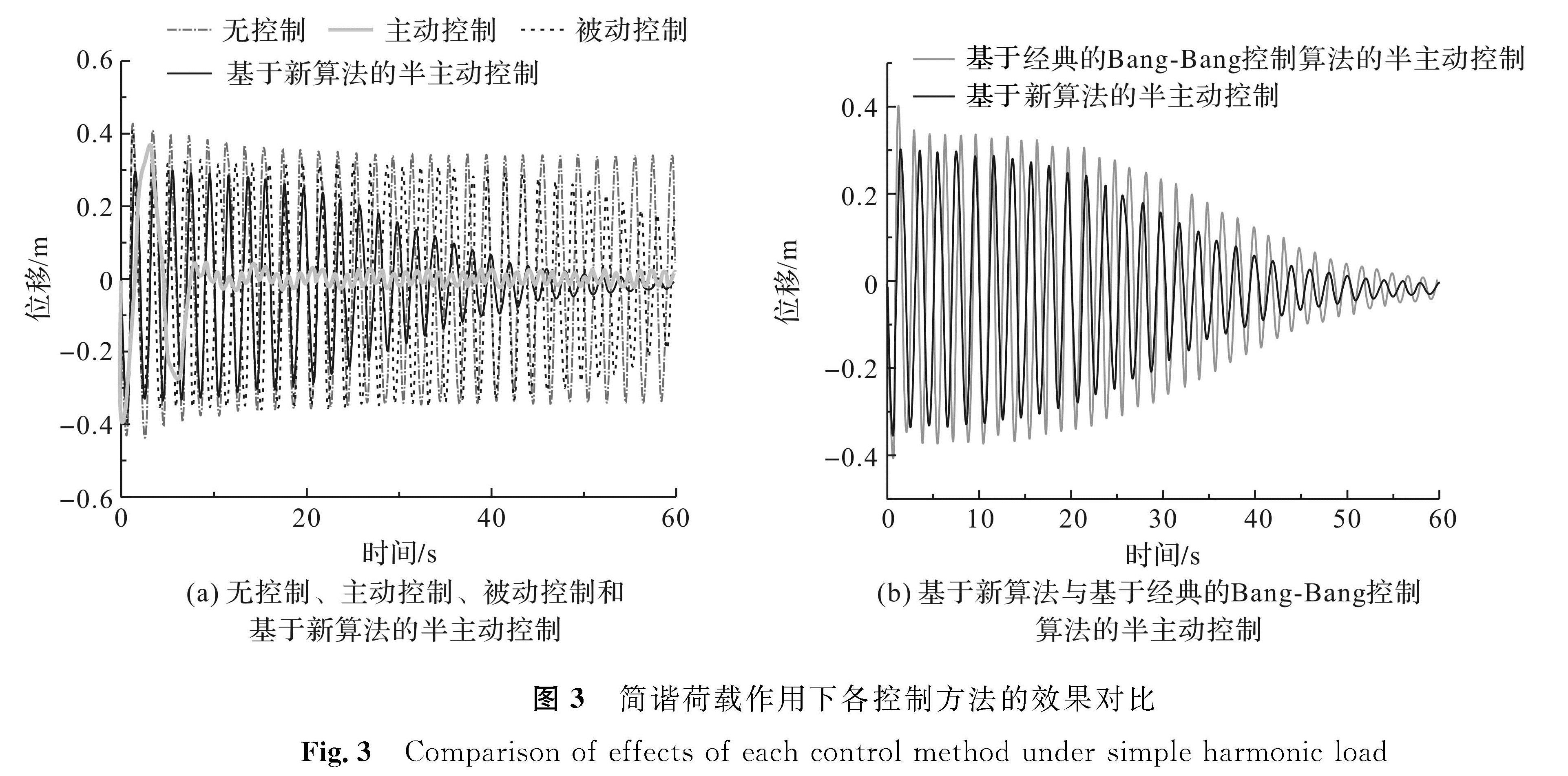
图3 简谐荷载作用下各控制方法的效果对比
Fig.3 Comparison of effects of each control method under simple harmonic load
由图3(a)可知,基于新算法的半主动控制的控制效果相比较于阻尼器被动控制的控制效果有了显著的提高,但还是不如主动控制的控制效果; 基于新算法的半主动控制的响应速度相对于被动控制提升较大,大约经过15 s就能够看见拉索振动幅度明显减小; 半主动控制下拉索最终位移大小非常接近主动控制下拉索的位移大小。由图3(b)可知,基于新算法的半主动控制做出响应的速度快于经典的Bang-Bang控制算法,控制效果出现显著改善的时间也较之更短,并且新算法的控制效果更稳定也更接近主动控制的控制效果。从表1可以看出简谐荷载作用下各控制方法的控制效率,其中主动控制的效率最高,为64.96%,其次是基于新算法的半主动控制,接下来分别是基于经典的Bang-Bang控制算法的半主动控制和被动控制; 还可以看出基于新算法的半主动控制的控制效率相比较于基于经典的Bang-Bang控制算法的半主动控制的控制效率有大约10%的提升。
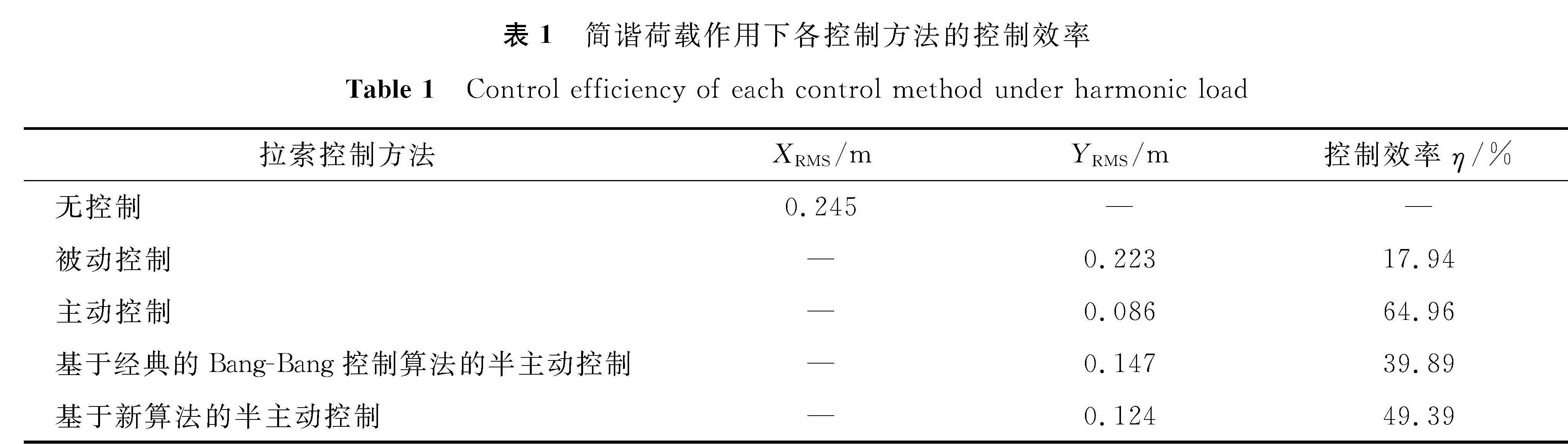
表1 简谐荷载作用下各控制方法的控制效率
Table 1 Control efficiency of each control method under harmonic load
2.2 风荷载作用
利用谐波合成法[15]来模拟风场,并且参考JTG/T 3360-01-2018 《公路桥梁抗风设计规范》[16]选取相关系数和风荷载公式,从而得到拉索中点处的风速和风荷载时程曲线,见图4。风荷载计算公式如下:
w(z,t)=1/2ρV2(z,t)CDsin2β。(6)
式(6)中:ρ为空气密度,kg/m3,一般情况下ρ=1.225 kg/m3; V(z,t)为瞬时风速,m/s; C为拉索等效迎风面的阻力系数,一般情况下取0.7; D为拉索的等效直径,m; β为拉索的等效安装倾斜角,(°)。
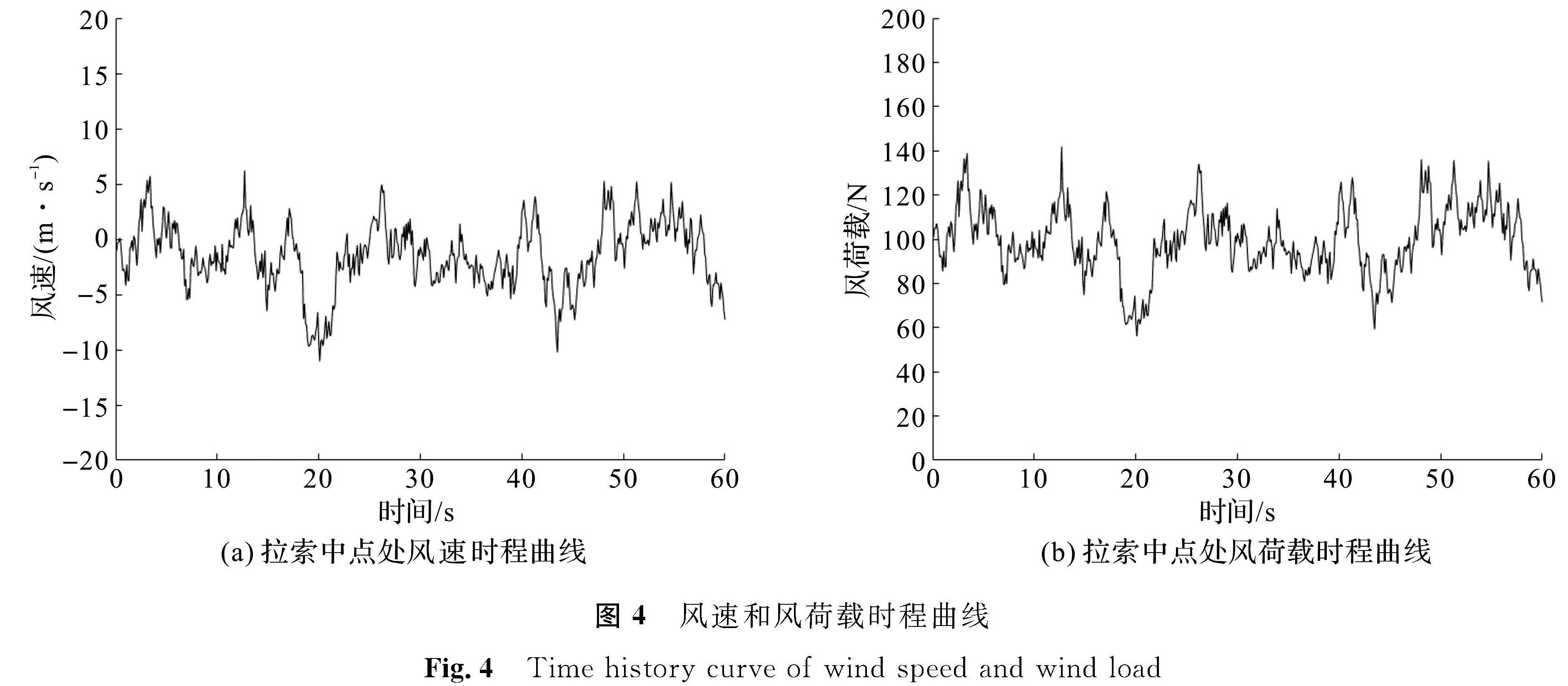
图4 风速和风荷载时程曲线
Fig.4 Time history curve of wind speed and wind load
图5给出了在风荷载作用下,无控制、主动控制、被动控制和基于新算法的半主动控制4种情况下拉索中点的位移时程,以及分别基于新算法与经典的Bang-Bang控制算法的半主动控制的控制效果对比。
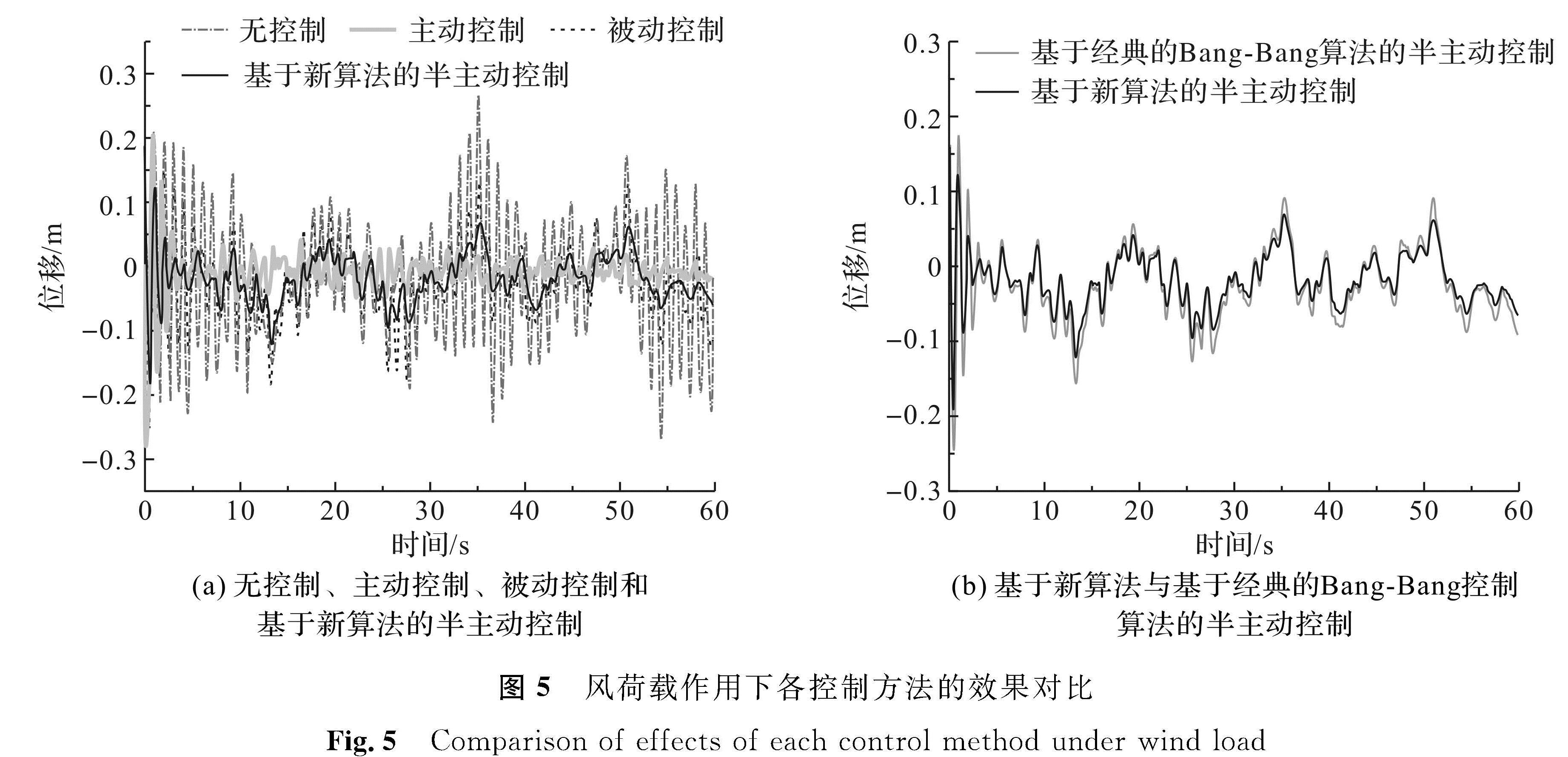
图5 风荷载作用下各控制方法的效果对比
Fig.5 Comparison of effects of each control method under wind load
由图5(a)可知,风荷载作用下基于新算法的半主动控制的控制效果明显好于被动控制的控制效果,但还是不及主动控制的控制效果; 基于新算法的半主动控制的响应速度相对于被动控制提高较大,接近主动控制的响应速度; 新算法的控制效果随着时间的推移最终可以达到主动控制对拉索振动的控制效果。由图5(b)可知,基于新算法的半主动控制在历经大概一个周期的振动后,就出现了比经典的Bang-Bang控制算法明显的控制效果; 新算法的控制效果更稳定,且振幅相比较于经典的Bang-Bang控制算法还有近20%的减少。从表2可以看出风荷载作用下各控制方法的控制效率,其中主动控制的效率最高,其次是半主动控制,控制效果最不明显的为被动控制; 还可以看出基于新算法的半主动控制的控制效率相比较于基于经典的Bang-Bang算法的半主动控制的控制效率提升了大概14%。
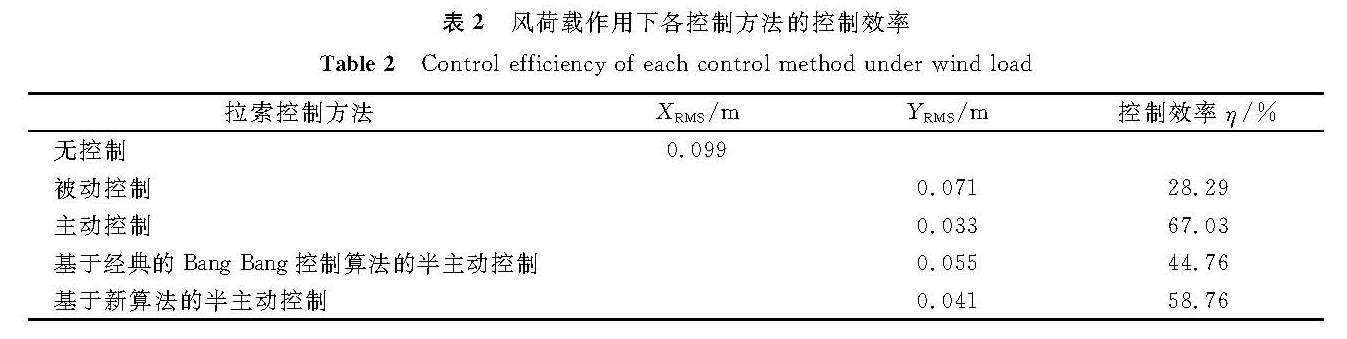
表2 风荷载作用下各控制方法的控制效率
Table 2 Control efficiency of each control method under wind load
3 结 论
本文基于新算法在Simulink软件中建立拉索MR阻尼器系统的模型,通过数值模拟分析,与主动控制、被动控制及基于经典的Bang-Bang控制算法的半主动控制的控制效果进行比较,可以得出如下结论:
1)在简谐荷载及风荷载的作用下,对拉索的振动控制效果都是主动控制最优,且对比未进行任何控制情况下控制效率都能达到60%以上。
2)基于新算法的半主动控制对拉索振动的控制效果明显,效率和响应速度都明显优于被动控制,相比较于主动控制还有所差距,但是半主动控制的控制效果最终十分接近主动控制。
3)基于新算法的半主动控制的控制效果要优于基于经典的Bang-Bang控制算法的半主动控制,控制效率能提高10%以上; 而且新算法的控制效果随着作用时间的推移更稳定。并且发现新算法能够有效减少阻尼力对拉索带来的影响,也能够有效改善斜拉索的振动幅度很小时但MR阻尼器出力却很大的不合理状况,使得新算法的控制效率得到明显提高,这对实际拉索振动控制有一定的参考价值。
- [1] HIKAMI Y, SHIRAISHI N. Rain-wind induced vibration of cables in cable-stayed bridges[J].Journal of Wind Engineering and Industrial Aerodynamics,1988,29(1):409.
- [2] 文志梅.超长斜拉索减振控制研究[D].石家庄:石家庄铁道大学,2018.
- [3] POSTON R W. Cable stay conundrum[J].The American Society of Civil Engineers,1998,68(8):58.
- [4] 邬喆华,陈勇,楼文娟,等.磁流变阻尼器对斜拉索减振效果的试验研究[J].振动工程学报,2004,17(2):102.
- [5] 杨玉冰,尹光照,刘建猛,等.斜拉索自供电MR阻尼器减振系统研究[J].科学技术创新,2019(18):54.
- [6] 汪志昊,寇琛,许艳伟,等.自供电MR阻尼器复合减振系统对斜拉索振动控制试验研究[J].振动与冲击,2019,38(10):1.
- [7] 方自奋.基于不同控制算法的斜拉桥MR阻尼器半主动控制研究:以当今世界最长最宽多塔斜拉桥(嘉绍大桥)为例[J].福建建筑,2019,257(11):45.
- [8] COLLINS R, BASU B, BRODERICK B. Control strategy using bang-bang and minimax principle for FRF with ATMDs[J].Engineering Structures,2006,28(3):349.
- [9] 禹见达.磁流变阻尼器对斜拉桥拉索振动控制的理论与试验研究[D].长沙:湖南大学,2007:65.
- [10] 韦凯,牛澎波,赵泽明,等.改进Bang-Bang控制的磁流变阻尼钢弹簧浮置板轨道基频的减振效果[J].中南大学学报(自然科学版),2019,50(7):1750.
- [11] 张耀辉,彭虎,张进秋,等.磁流变半主动悬挂引入位置阈值的改进Bang-Bang控制[J].噪声与振动控制,2019,39(2):14.
- [12] 禹见达,陈政清,王修勇,等.改进的Bang-Bang控制算法的理论与试验研究[J].振动与冲击,2010,29(2):60.
- [13] 王修勇,孟庆甲,郭雪涛,等.基于磁致伸缩作动器的拉索主动控制与多级Bang-Bang控制仿真分析[J].地震工程与工程振动,2014,34(2):161.
- [14] 郑万山,唐光武,郑罡.大跨度斜拉桥拉索疲劳参数分析中移动荷载的选定[J].公路交通技术,2010(5):52.
- [15] WEBER F, DISTL H. Amplitude and frequency independent cable damping of Sutong Bridge and Russky Bridge by magnetorheological dampers[J].Structural Control and Health Monitoring,2014,22(2):237.
- [16] 中国人民共和国交通运输部.公路桥梁抗风设计规范:JTG/T 3360-01-2018[S].北京:人民交通出版社股份有限公司,2018.