 图 1 粒子更新过程
Fig.1 Process of particle renewal
图 1 粒子更新过程
Fig.1 Process of particle renewal
LI Junxia,ZHANG Miao,ZHENG Hui.Research on prediction of remaining useful life of lithium battery based on OOSMPF[J].Journal of Zhejiang University of Science and Technology,2021,33(01):8-15.[doi: 10.3969/j.issn.1671-8798.2021.01.002]

锂电池作为目前便携式电子设备及电动汽车的重要供能来源[1],在现代生活中扮演着不可或缺的角色。锂电池失效会导致整个系统性能下降,带来运行事故[2]。如果能准确地估计出锂电池的剩余使用寿命(remaining useful life,RUL)[3],为用户提供合理的电池更换时间,就能在电池失效前避免故障的发生。锂电池剩余使用寿命预测方法可分为模型驱动方法和数据驱动方法两大类[4]。模型驱动方法主要根据电池的失效机制、电池材料特性和负载条件来建立锂电池性能退化模型,从而实现对锂电池剩余使用寿命的预测[5]。He等[6]建立了锂电池物理降解行为的双指数经验模型,通过训练数据集来实现对模型参数的辨识,从而实现对锂电池健康状态和剩余使用寿命的估算。Li等[7]通过测量锂电池的阻抗谱,并将其作为充放电循环次数的函数,从而研究锂电池的循环使用寿命。Micea等[8]采用二阶多项式模型并根据电池循环次数,利用最小二乘法实现了对电池容量的估计。锂电池的电化学反应过程复杂,很难用精确的数学模型来描述两者之间的关系。近年来,许多研究者采用数据驱动方法进行锂电池剩余使用寿命预测。
数据驱动方法不需要知道对象系统的精确数学模型,它是以数据为研究对象,根据锂电池历史数据或状态数据进行剩余使用寿命预测的方法[9]。李赛等[10]采用相关向量机算法实现锂电池剩余使用寿命的预测,试验结果表明概率密度分布能有效地反映预测结果的不确定性。秦琪等[11]采用粒子群算法对粒子滤波(particle filter,PF)算法中的重采样过程进行优化,获得了准确的锂电池剩余寿命的概率分布。张朝龙等[12]采用混沌粒子群算法对相关向量机算法进行优化,并将其应用于锂电池充放电循环中容量衰退的预测,试验结果证明了其有效性。锂电池作为非线性电化学系统,其容量呈非线性退化,针对非线性非高斯问题,PF算法被证明是一种很有效的方法。PF算法是一种采用蒙特卡罗方法的贝叶斯状态估计算法[13],它被广泛应用于更新模型的状态和参数[14]。Dalal等[15]提出PF框架实现对锂电池剩余容量进行预测,试验结果表明PF算法对锂电池剩余容量预测准确度提升。Miao等[16]使用经验衰减模型和无迹PF算法对锂电池剩余使用寿命进行预测,试验结果表明PF算法能对预测结果的不确定性进行表达。Wang等[17]应用球形容积PF算法预测锂电池剩余使用寿命,使用球体积作为PF算法的主要方程,采用阈值法来推算锂电池的剩余使用寿命,试验结果表明无迹PF算法能准确预测锂电池剩余使用寿命。罗悦[18]采用AR模型,应用PF算法,实现准确的锂电池剩余使用寿命估计,并给出结果的不确定性表达,有助于提高系统可靠性。Ahwiadi等[19]提出了增强突变粒子滤波(enhanced mutated particle filter,EMPF)算法,通过加入突变粒子和粒子剔除机制方面的改进措施,从而实现对锂电池荷电状态估计和剩余使用寿命的预测。Cheng等[20]提出了增强粒子滤波(enhanced particle filter,EPF)算法,该算法通过对小权重粒子进行校正并对多项式重采样改进,实现对风力涡轮机传动系齿轮箱寿命的预测。然而,PF算法在锂电池剩余寿命预测中也存在一定的缺陷,如果在序贯重要性采样阶段将部分模糊测量的值用于粒子的更新,多次迭代后估计误差增大将会导致不准确的状态估计,因此,笔者针对上述缺陷提出无序测量粒子滤波(out of sequence measurement particle filter,OOSMPF)算法。
1 模型构建在锂电池的寿命预测与健康管理中,一般采用定期的电池容量测试来制定相应的电池维护和更换策略。从容量测试中获得的电池容量衰退数据用于描述电池健康状况和寿命预测。在实际锂电池寿命评价中,研究人员通过加速充放电试验来获取电池容量退化数据。经试验证明锂电池容量衰退数据更接近于双指数衰退曲线,因此许多研究者采用双指数模型预测电池寿命。双指数模型被描述如下:
Qk=aexp(bk)+cexp(dk)。(1)
式(1)中:Qk为第k次循环的锂电池容量; k为锂电池循环次数; a、b、c和d为双指数模型的参数,参数a和c与锂电池内部电阻有关,b和d与锂电池衰退速率有关。
双指数模型中有4个参数需要训练,这样会加大模型训练的难度,因此需要对模型进行改进以减少模型参数的个数。通过多项式推导得到锂电池容量衰退的递推公式:
Qk=Qk-1exp(b)+cexp(d(k-1))(1-exp(b-d))+ωk,ωk~N(0,σw)。(2)
式(2)中:b、c、d为锂电池容量衰退模型的参数; ωk为状态噪声,满足均值为0、方差为σw的标准正态分布。
状态方程对应的观测方程为
Qk~=Qk+vk,vk~N(0,σv)。(3)
式(3)中:Qk~为第k循环锂电池的观测容量; vk为观测噪声,满足均值为0、方差为σv的标准正态分布。通过对模型进行改进,参数的数量由4个减少到3个,从而降低了模型的复杂度和缩短了算法的执行时间。
2 OOSMPF算法的提出2.1 PF算法PF算法是贝叶斯框架下的一种概率预测方法。对于一个动态系统模型,状态转移函数为
xk=fk(xk-1,wk-1)。(4)
式(4)中:xk为第k循环系统状态; xk-1为第k-1循环系统状态; fk为状态转移函数; wk-1为第k-1循环过程噪声。
测量函数为
zk=hk(xk,vk)。(5)
式(5)中:zk为第k循环测量值; hk为观测函数; vk为第k循环观测噪声。
粒子滤波算法过程描述如下:
1)初始化。设置初始粒子总数为N,状态噪声为wk-1,观测噪声为vk。从先验概率密度函数p(x0)生成初始粒子{x(i)0}Ni=1,粒子权重为1/N。
2)重要性采样。假设在k-1时刻,已知后验概率p(xk-1|z1:k-1),且xk服从一阶马尔科夫过程,则k时刻的先验分布为
p(xk|z1:k-1)=∫p(xk|xk-1)p(xk-1|z1:k-1)dxk-1。
更新k时刻的后验概率p(xk|z1:k)为
p(xk|z1:k)=(p(zk|xk)p(xk|z1:k-1))/(p(zk|z1:k-1))。
3)计算重要性权重,得
Wk(xk)=(p(z1:k|xk)p(xk))/(q(xk|z1:k))∝(p(xk|z1:k))/(q(xk|z1:k))。(6)
式(6)中:z1:k等同于前一公式中的zk。
4)序贯重要性重采样。经过几次迭代,有些粒子的权重因太小而被忽略,只有少部分粒子的权重较大,将这部分粒子用于状态估计会导致最终结果的不准确,因此需要对粒子进行重采样,得有效粒子数为

式(7)中:Neff为有效粒子数; w ~(i)t为粒子的权重。
采样后,粒子的后验概率为

式(8)中:x(i)k为第k时刻的粒子; x(j)k为重采样后的粒子; ni为粒子复制的次数。
5)获得粒子状态的估计值。

式(9)中:xk为第k时刻粒子状态; C-k为先验粒子的方差; C+k为后验粒子的方差。
2.2 OOSMPF算法序贯重要性重采样(sequential importance resampling,SIR)是克服PF算法权值退化的关键一步。但是经过SIR过程后,会出现粒子的后验协方差C+k大于先验协方差C-k的现象,这种现象称之为模糊测量更新。Cramer-Rao理论表明一个好的滤波器的后验协方差应该不大于先验协方差[21]。如果将模糊测量更新作为真实的测量更新就会导致粒子方差的增加,从而导致粒子的分散,带来更低的置信估计,因此需要对SIR过程产生的模糊测量进行改进。
当估计值与真实状态下的测量值相同时,粒子在测量更新完成后,常出现协方差增加的现象[22]。如图1(a)所示,观测方程zk=hk(xk,vk)是关于xk的函数,观测噪声vk呈高斯分布; 观测似然函数p(zk|xk)如图1(b)所示,观测是在真实状态x*下进行的; 图1(c)展示了状态xa-和xb-的先验分布; 在测量更新阶段得到粒子的后验分布,如图1(d)所示,从图中可以看出先验分布为xa-经过测量更新阶段在后验分布中变得更分散。
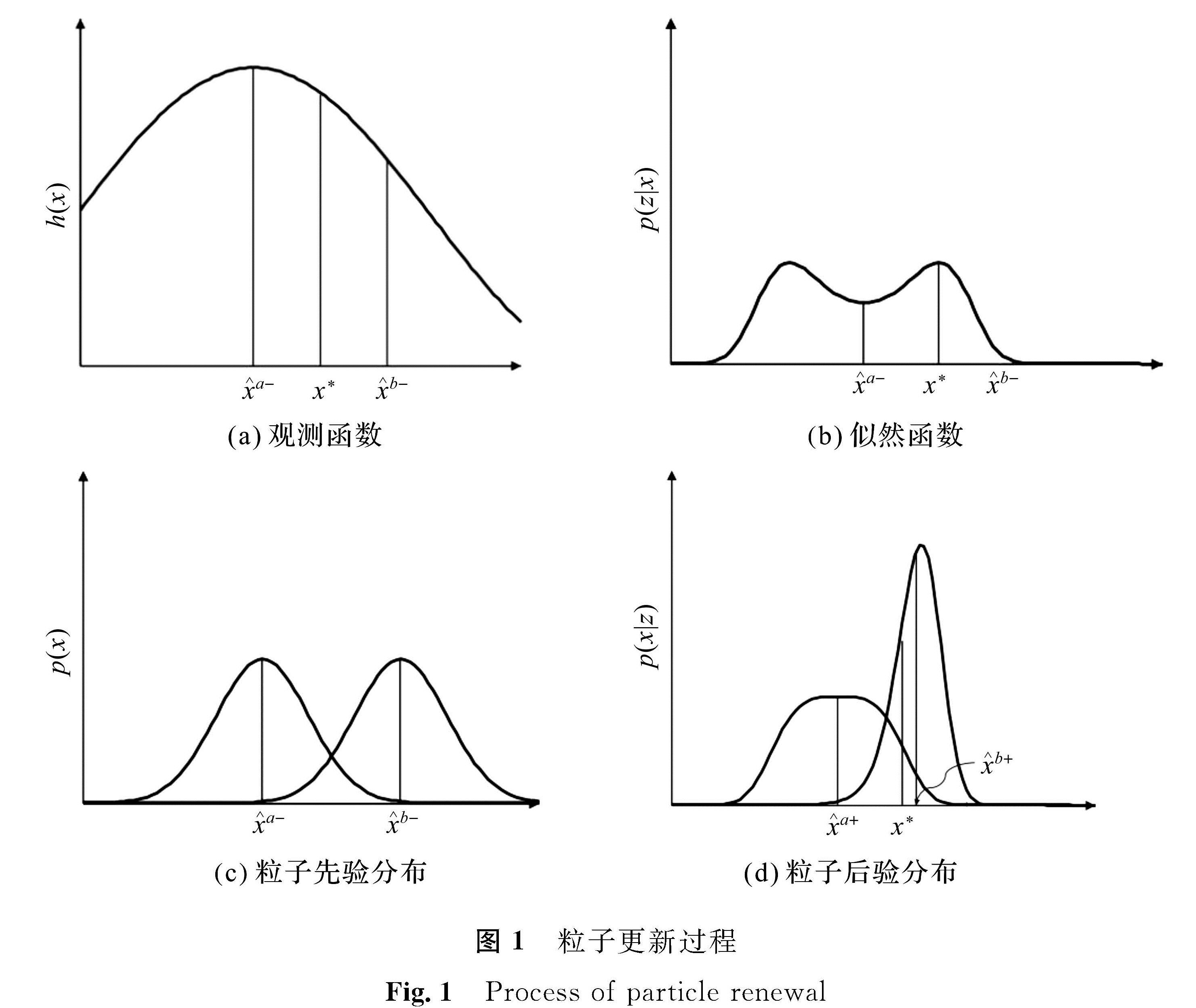
图1 粒子更新过程
Fig.1 Process of particle renewal
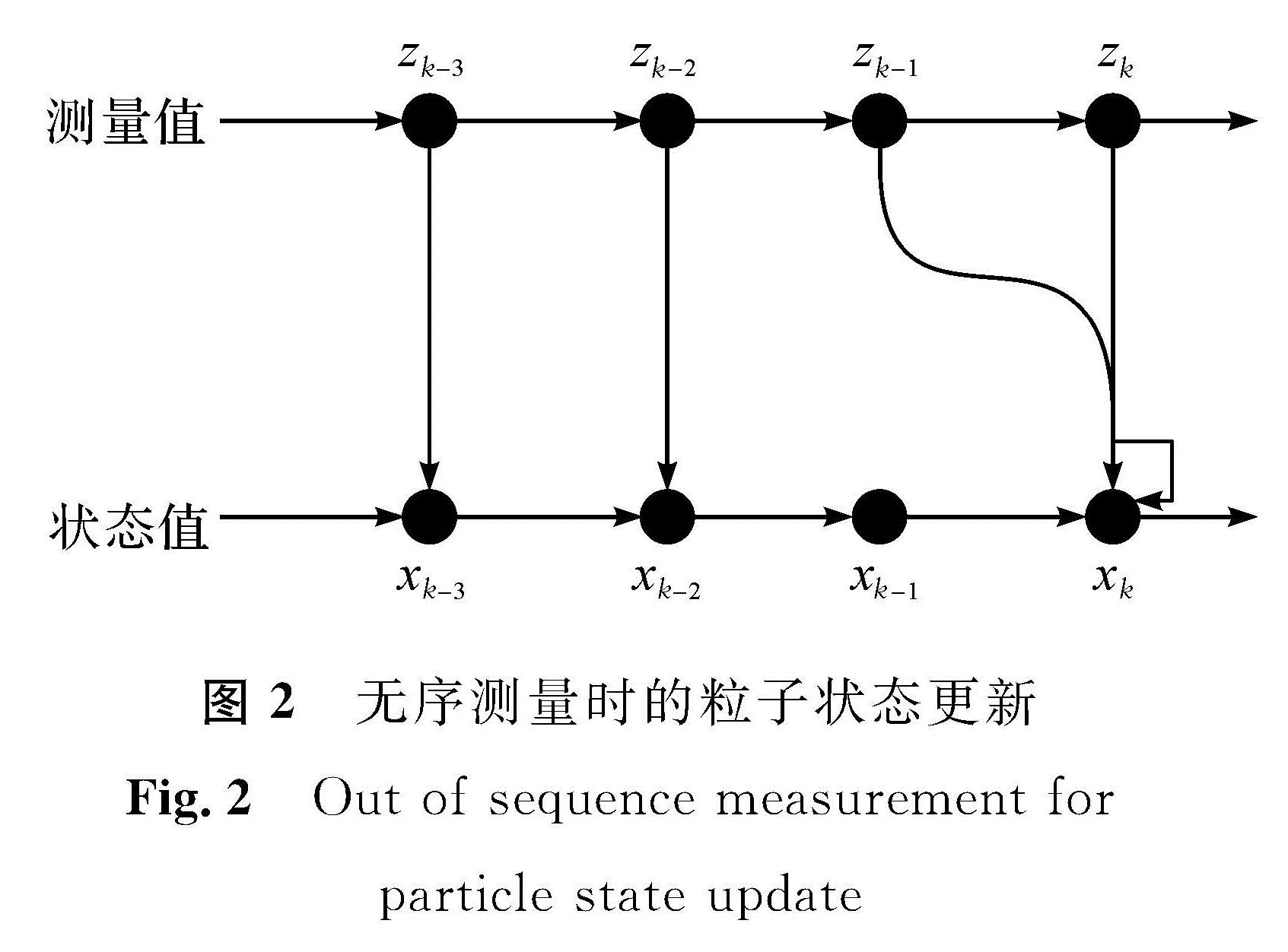
图2 无序测量时的粒子状态更新
Fig.2 Out of sequence measurement for particle state update
测量的模糊性是导致滤波器退化和粒子发散的一个重要原因。模糊测量更新不仅由测量模型决定,而且还要由滤波器估计的先验分布决定。模糊测量更新会使粒子的后验分布分散,从而导致较低的粒子状态置信估计。针对PF算法局部测量模糊问题,本研究提出OOSMPF算法用以获得准确的当前位置估计,其核心思想是保留模糊测量数据,当先验分布变得适合用于测量更新时再使用,这在本质上等价于某些延迟到达的情况。图2显示了无序测量时的粒子状态更新,观测值zk-1对应于k-1时刻的状态值xk-1。若k-1时刻的测量值zk-1是模糊的,那么在测量更新阶段先跳过测量zk-1,在下一次粒子状态更新阶段再使用zk-1。
利用无序测量进行粒子的更新,
x ~ik=fk(xik-1,wk-1)。(10)
式(10)中:x ~ik为当前k时刻粒子的先验分布。
归一化后的粒子权重为
w ~ik*=p(za|x ~ia)w ~ik。(11)
式(11)中:w ~ik为k时刻未归一化权重; za为模糊测量值,s<a<k,s为出现模糊测量前的最后一次循环。
在初始化滤波后,采用SIR-PF算法得到粒子状态。如果所得的后验粒子状态协方差矩阵的行列式|C+k|比先验粒子状态的|C-k|大,则是模糊测量。如果出现模糊测量,则只执行预测步骤且跳过测量更新阶段。跳过的测量数据被存储在集合A中。检查集合A是否为空,如果集合A非空,则采用先入先出的顺序执行OOSM过程来对测量值进行更新,获得粒子分布{xik*},i=1,2,…,N。
2.3 试验步骤OOSMPF算法的实现步骤如下:
1)初始化粒子分布{x(i)0},i=1,2,…,N,给定粒子数目N,状态噪声ωk,观测噪声vk;
2)从式(1)中获得采样粒子xik,i=1,2,…,N;
3)计算采样粒子对应的权重ωik,并进行权重归一化∑Ni=1ωik=1;
4)对粒子进行重采样,得到重采样粒子;
5)获得目前时刻的粒子状态{x ~ik},i=1,2,…,N;
6)如果后验粒子的方差C+k大于先验粒子的方差C-k,则跳过更新执行第12步,将zk存储在A中,否则执行第8步到第11步;
7)从p(xa|xis,x ~ik)中进行采样,得到粒子x ~ia;
8)计算粒子的权重w ~ik*=p(za|x ~ia)w ~ik,并进行权重归一化∑Ni=1ωik*=1;
9)重采样;
10)获得粒子的状态xik*=x ~jk;
11)如果新获得的粒子方差C+k*小于后验粒子的方差C+k,则取粒子状态为{x(i)k*},i=1,2,…,N;
12)得到最终粒子状态{xik},i=1,2,…,N。
3 试验结果和性能评价3.1 试验平台
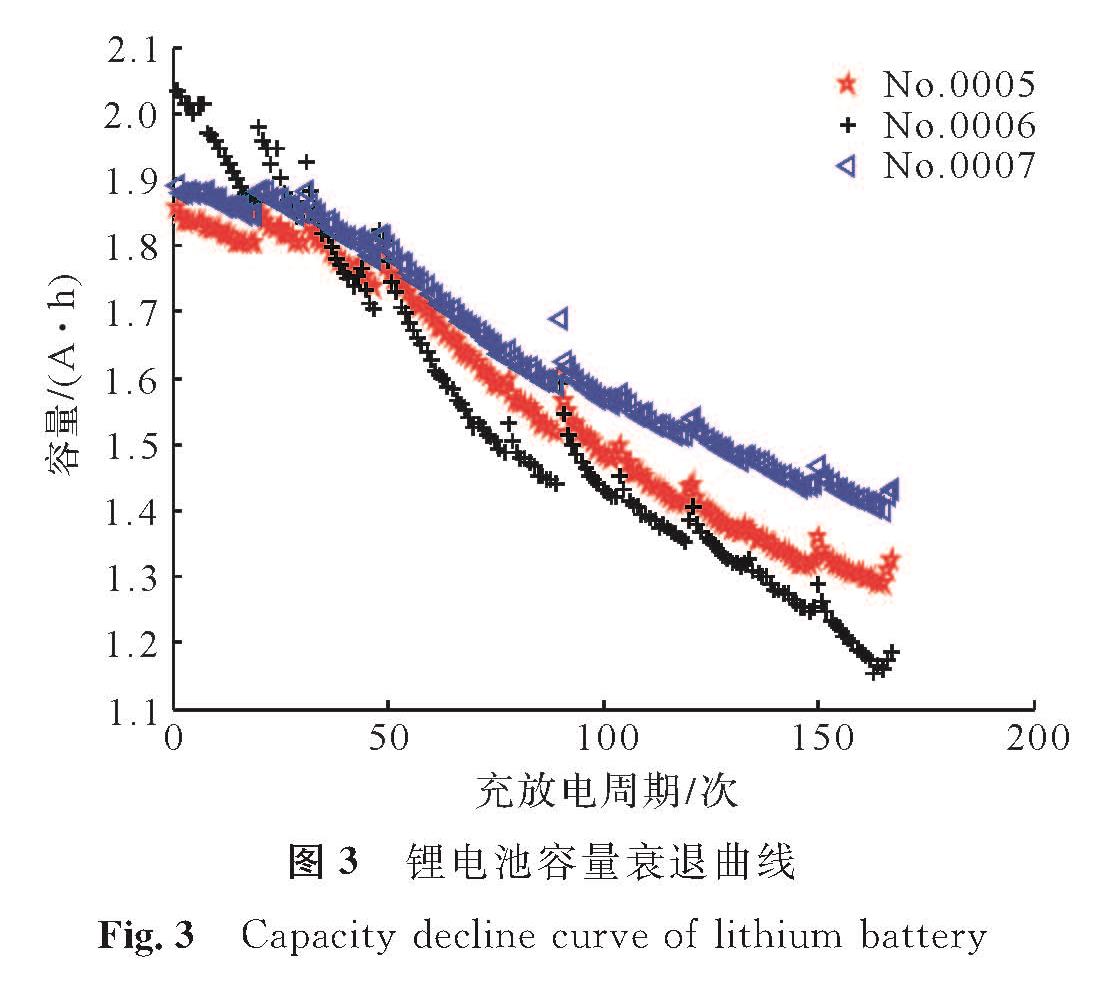
图3 锂电池容量衰退曲线
Fig.3 Capacity decline curve of lithium battery
试验所采用的电池容量退化数据为美国航空航天局(NASA)卓越故障预测中心(PCoE)提供的锂电池试验数据。试验平台采用额定容量为2 A·h的18650型钴酸锂电池,采用电池编号为No.0005、No.0006、No.0007的数据进行分析。电池充放电试验在室温24 ℃环境下进行,在1.5 A恒定电流模式下充电,直到电池电压达到4.2 V,然后在恒定电压模式下充电,直到充电电流降至20 mA。No.0005、No.0006、No.0007电池分别在2 A的恒定电流下放电,使电池电压分别降至2.7、2.5、2.2 V。反复地充放电循环以加速电池老化,而阻抗测量提供了内部电池参数的变化情况。随着老化的加快,当电池达到寿命终止(end of life,EOL)标准,即额定容量下降20%时试验停止。锂电池容量衰退曲线如图3所示,从图中可以看出,电池容量整体呈下降趋势,在短时间内容量呈升高趋势,这种现象是由于电池在休息时间内自动充电引起的。
3.2 试验效果图及数据对比分析试验采用的No.0005、No.0006、No.0007号锂电池均有167个生命周期点,为了得到较好的训练效果,No.0005和No.0007电池选用60次循环数据作为训练数据,剩下的107次循环作为测试数据。No.0006电池容量下降较快,在60次充放电周期后就达到了寿命终点,因此选择的训练数据不应大于60个,本试验选择前40个数据作为训练数据。
基于实测值和预报值,本研究采用以下3个指标来衡量RUL预报模型的性能:平均绝对误差(mean absolute error,MAE)、均方根误差(root of mean square error,RMSE)及剩余使用寿命预测误差(remain-ing useful life predict error,RULPE),其值VMAE、VRMSE、VRULPE的计算方法分别如下:

式(12)~(14)中:m为样本数; h(xi)为预测值; yi为真实值。VRULT为剩余使用寿命的真实值,VRULP为剩余使用寿命的预测值。
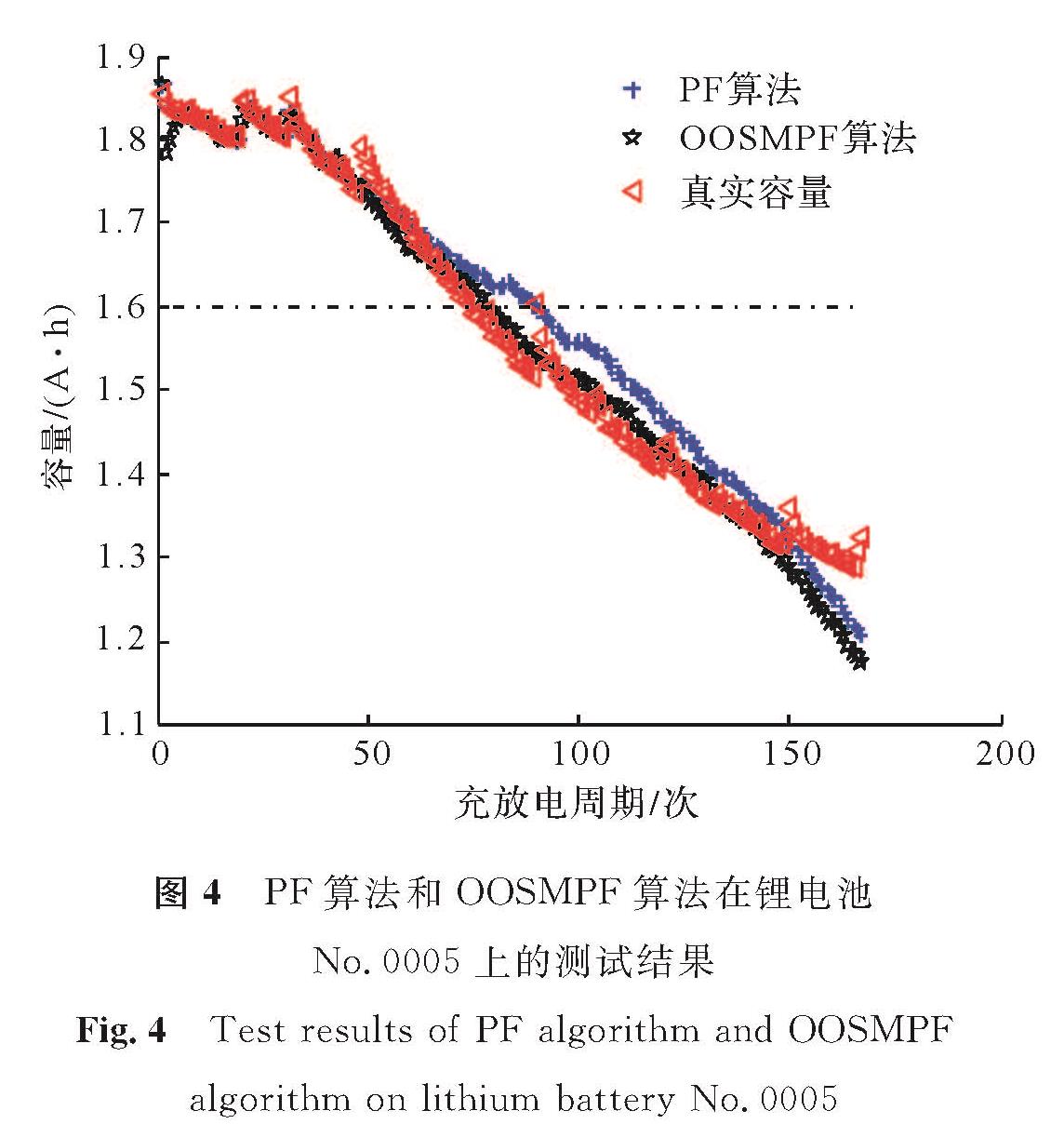
图4 PF算法和OOSMPF算法在锂电池No.0005上的测试结果
Fig.4 Test results of PF algorithm and OOSMPF algorithm on lithium battery No.0005
仿真试验结果如图4~6所示。
当电池容量达到失效阈值1.6 A·h时,可以认为电池已接近使用寿命的终点,因此对电池进行寿命预测是在电池达到失效阈值附近区域时进行的。通过对3组电池的试验结果对比发现,在电池达到失效阈值范围内OOSMPF相比较于PF算法在进行电池剩余寿命预测效果上得到提升,预测曲线也能更准确地反映锂电池容量下降的过程,因此预测结果更准确。
对3组数据均选取粒子数为100个进行测试。表1总结了PF算法、EMPF算法、EPF算法和OOSMPF算法在电池No.0005、No.0006、No.0007的预测误差。从表1中可以看出,No.0005号和No.0007号电池在相同的预测起点第60次循环时,PF算法对锂电池的RULPE结果分别为15次和8次,EMPF算法对锂电池的RULPE结果均为13次,EPF算法对锂电池的RULPE结果分别为12次和7次,而OOSMPF算法得到相应的误差结果分别为7次和5次。对No.0006号电池,PF算法、EMPF算法、EPF算法和OOSMPF算法得到的锂电池RULPE结果分别为26次、18次、16次和15次。引入的平均绝对误差和均方根误差对试验做进一步评价,得出OOSMPF算法相比较于PF算法、EMPF算法和EPF算法误差更小,即OOSMPF算法的预测精度高于其他PF算法的预测精度。
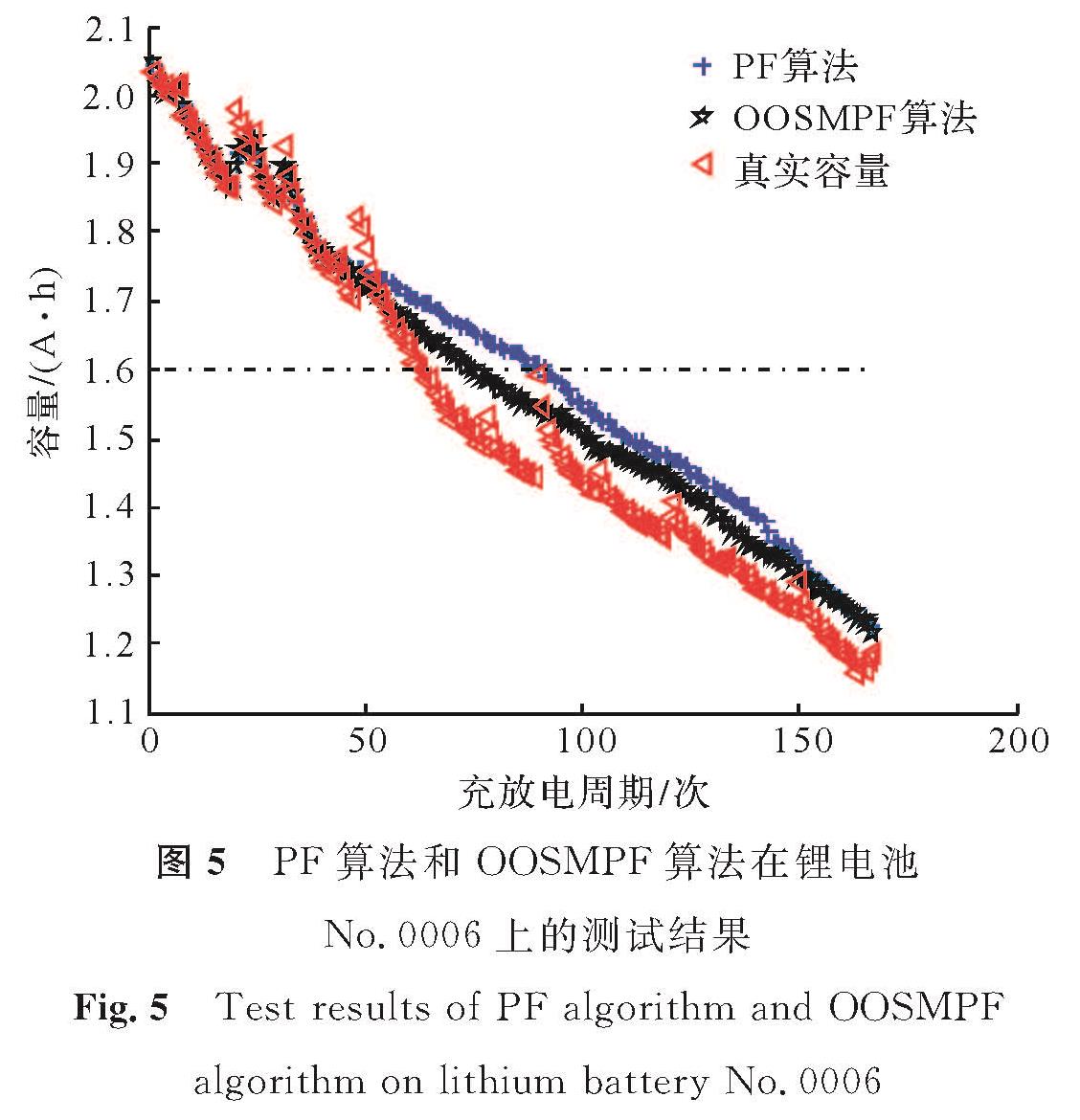
图5 PF算法和OOSMPF算法在锂电池No.0006上的测试结果
Fig.5 Test results of PF algorithm and OOSMPF algorithm on lithium battery No.0006
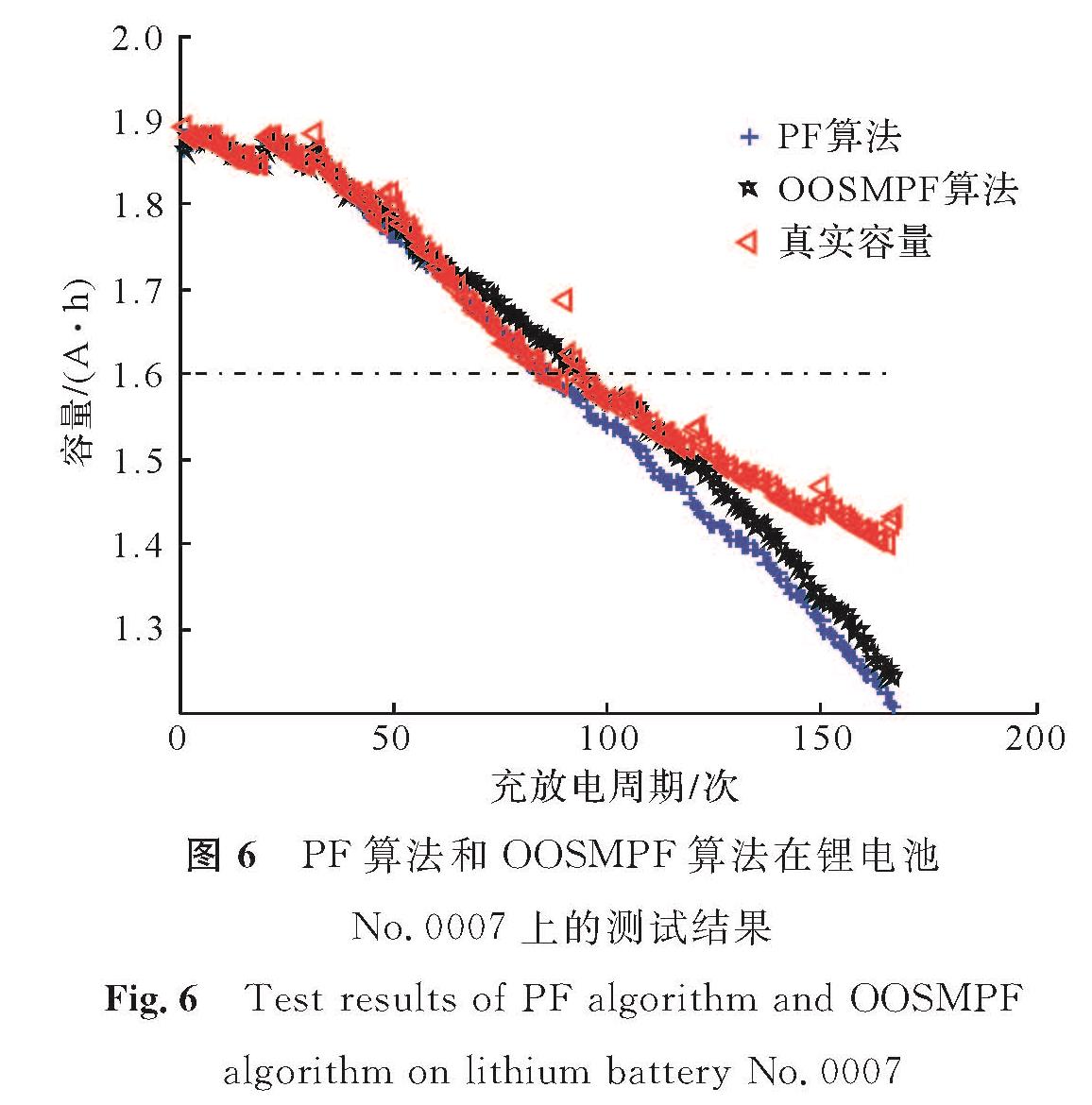
图6 PF算法和OOSMPF算法在锂电池No.0007上的测试结果
Fig.6 Test results of PF algorithm and OOSMPF algorithm on lithium battery No.0007
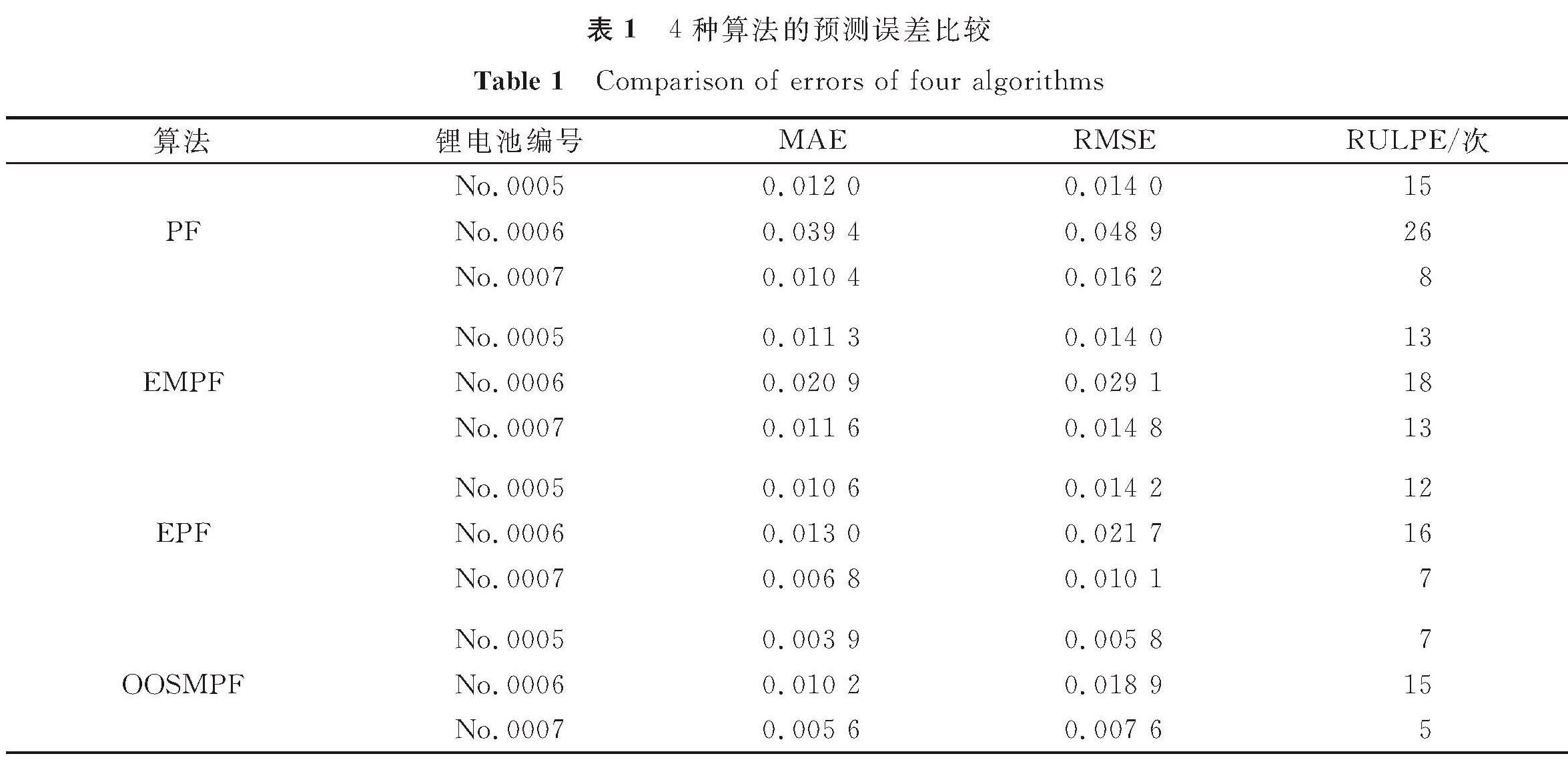
表1 4种算法的预测误差比较
Table 1 Comparison of errors of four algorithms
4 结 语
本研究提出了基于OOSMPF算法的锂电池剩余寿命预测方法,本算法解决了基本粒子滤波算法中模糊测量对锂电池剩余寿命预测不准确的问题。OOSMPF算法针对模糊测量现象增加了无序测量步骤,这样就避免了将模糊测量的值直接用于计算粒子状态,进而导致算法的灵敏度不高的问题。OOSMPF算法用于锂电池剩余寿命预测的试验结果显示,相比于PF算法,OOSMPF算法的预测结果与实际电池容量衰退曲线更接近,拟合度更高,同时所得的锂电池剩余寿命的预测结果更准确。
- [1] 王帅,韩伟,陈黎飞,等.基于粒子滤波的锂离子电池剩余寿命预测[J].电源技术,2020,44(3):346.
- [2] 林慧龙,李赛.基于粒子滤波的锂离子电池剩余使用寿命预测[J].科学技术与工程,2017,17(29):296.
- [3] 张凝,徐皑冬,王锴,等.基于粒子滤波算法的锂离子电池剩余寿命预测方法研究[J].高技术通讯,2017,27(8):699.
- [4] 韦海燕,陈静,王惠民,等.新陈代谢灰色粒子滤波实现电池剩余寿命预测[J].电工技术学报,2020,35(6):1181.
- [5] 王腾蛟,郭建胜,慕容政,等.一种预测锂电池剩余寿命的改进粒子滤波算法[J].空军工程大学学报(自然科学版),2018,19(5):47.
- [6] HE W, WILLIARD N, OSTERMAN M, et al. Prognostics of lithium-ion batteries based on Dempster-Shafer theory and the Bayesian Monte Carlo method[J].Journal of Power Sources,2011,196(23):10314.
- [7] LI J, MURPHY E, WINNICK J, et al. Studies on the cycle life of commercial lithium ion batteries during rapid charge-discharge cycling[J].Journal of Power Sources,2001,102(1/2):294.
- [8] MICEA M V, UNGUREAN L, CARSTOIU G N, et al. Online state-of-health assessment for battery management systems[J].IEEE Transactions on Instrumentation & Measurement,2011,60(6):1997.
- [9] 郝雪玲.锂离子电池健康状态多指标融合和剩余寿命预测方法研究[D].哈尔滨:哈尔滨理工大学,2019.
- [10] 李赛,庞晓琼,林慧龙,等.基于相关向量机的锂离子电池剩余寿命预测[J].计算机工程与设计,2018,39(8):2682.
- [11] 秦琪,赵帅,陈绍炜,等.基于粒子群优化粒子滤波的电容剩余寿命预测[J].计算机工程与应用,2018,54(20):237.
- [12] 张朝龙,何怡刚,袁莉芬.基于CPSO-RVM的锂电池剩余寿命预测方法[J].系统仿真学报,2018,30(5):1935.
- [13] DOUCET A, GODSILL S, ANDRIEU C. On sequential Monte Carlo sampling methods for Bayesian filtering[J].Statistics and Computing,2000,10(3):197.
- [14] SHENOY A V, PRAKASH J, PRASAD V, et al. Practical issues in state estimation using particle filters: case studies with polymer reactors[J].Journal of Process Control,2013,23(2):123.
- [15] DALAL M, MA J, HE D. Lithium-ion battery life prognostic health management system using particle filtering framework[J].Proceedings of the Institution of Mechanical Engineers,2011,225(1):83.
- [16] MIAO Q, XIE L, CUI H, et al. Remaining useful life prediction of lithium-ion battery with unscented particle filter technique[J].Microelectronics & Reliability,2013,53(6):805.
- [17] WANG D, YANG F, TSUI K L, et al. Remaining useful life prediction of lithium-ion batteries based on spherical cubature particle filter[J].IEEE Transactions on Instrumentation and Measurement,2016,65(6):1282.
- [18] 罗悦.基于粒子滤波的锂离子电池剩余寿命预测方法研究[D].哈尔滨:哈尔滨工业大学,2012.
- [19] AHWIADI M, WANG W. Enhanced mutated particle filter technique for system state estimation and battery life prediction[J].IEEE Transactions on Instrumentation and Measurement,2019,68(3):923.
- [20] CHENG F Z, QU L Y, QIAO W, et al. Enhanced particle filtering for bearing remaining useful life prediction of wind turbine drivetrain gearboxes[J].IEEE Transactions on Industrial Electronics,2019,66(6):4738.
- [21] IMANDL M, KRA 'LOVEC J, TICHAVSKY ' P. Filtering, predictive, and smoothing Crame 'r-Rao bounds for discrete-time nonlinear dynamic systems[J].Automatica,2001,37(11):1703.
- [22] KIM Y, HONG K, BANG H. Utilizing out-of-sequence measurement for ambiguous update in particle filtering[J].IEEE Transactions on Aerospace & Electronic Systems,2018,54(1):493.